Theory and practice of land mobile robotic systems

The development of new operational doctrines, especially for urban hostilities and asymmetric conflicts, will require new systems and technical tools that will reduce losses among military and civilians. This is possible to implement through the development of SMRC, the use of advanced technologies for monitoring and collecting information, as well as intelligence and target detection, protection and precision strike. SMRC, like their flying counterparts, due to the wide use of ultramodern robotic technologies do not have a human operator on board.
These systems are also indispensable for working in a contaminated environment or for other “dull, dirty, and dangerous” tasks. The need to develop advanced SMRK is connected with the need to use unmanned systems for direct support on the battlefield. According to some military experts, uninhabited vehicles, the level of autonomy of which will consistently increase, will become one of the most important tactical elements in the structure of modern ground forces.

TERRAMAX M-ATV armored vehicle based robotic complex to head a convoy of unmanned vehicles
Operational needs and development of SMRK
At the end of 2003, the US Central Command issued urgent, impatient requests for countering the threat of improvised explosive devices (IEDs). The JGRE (Joint Ground Robotics Enterprise) Ground Robotic Systems Organization has developed a plan that could quickly provide a significant increase in capabilities through the use of small robotic machines. Over time, these technologies have evolved, an increasing number of systems have been deployed, and users have received advanced prototypes for evaluation. As a result, the number of military personnel and units involved in the field of internal security, who have learned to operate advanced robotic systems, has increased.
The Advanced Defense Research Directorate DARPA is currently conducting research into robotic machine learning technologies based on its developments in the field of artificial intelligence, as well as recognition of the resulting images. All of these technologies, developed as part of the UPI program (Unmanned Perception Integration - embedding automatic perception), can provide a better understanding of the environment / terrain with a vehicle with good mobility. The result of this research was a machine called the CRUSHER, whose operational evaluation began in 2009 year; Since then, several more prototypes have been made.
The MPRS (Man-Portable Robotic System) program is currently focused on developing autonomous navigation and collision avoidance systems for small robots. It also defines, studies and optimizes technologies designed to increase the level of autonomy and functionality of robotic systems. The RACS (Robotic for Agile Combat Support) program develops various robotic technologies to meet current threats and operational requirements, as well as future needs and capabilities. The RACS program also develops and integrates automation technologies for various combat missions and various platforms based on the concept of a common architecture and such fundamental characteristics as mobility, speed, control and interaction of several vehicles.
The participation of robots in modern combat operations allows the armed forces to gain invaluable experience in their operation. Several interesting directions emerged concerning the use of unmanned aerial vehicles (UAVs) and SMRK in one operational theater, and military planning bodies intend to study them carefully, including the general management of several platforms, the development of interchangeable onboard systems that can be installed both on UAVs and on SMRK with the aim of expanding global capabilities, as well as new technologies for promising combat uninhabited systems.
According to the ARCD (Active Range Clearance Developments) experimental program, the development of active route routing will develop a so-called “zone security assurance by automatic means” scenario in which several SMRCs will work together with several UAVs. In addition, technology solutions will be assessed regarding the use of radar stations on unmanned platforms, an assessment of the integration of control and monitoring systems and the overall efficiency of the systems. As part of the ARCD program, the US Air Force plans to develop the technologies needed to increase the efficiency of joint actions of the SMRC and the UAV (both aircraft and helicopter schemes), as well as algorithms for the seamless operation of sensors on all the platforms involved, the exchange of navigation data and data certain obstacles.
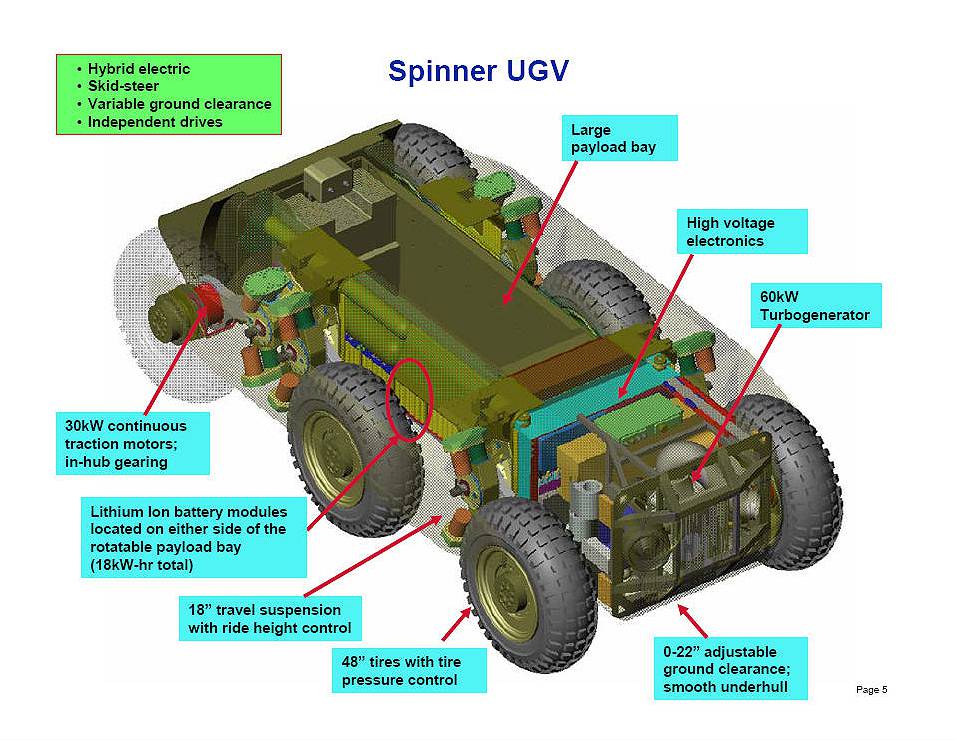
The internal layout of mechanical, electrical and electronic components SMRK SPINNER
Army Research Laboratory ARL (Army Research Laboratory) conducts experiments as part of its research programs in order to assess the sophistication of the technology. For example, ARL conducts experiments that evaluate the capabilities of a fully autonomous SMRK to detect and avoid moving cars and moving people. In addition, the Center for Space and Naval Weapon Systems of the American fleet conducts research on new robotic technologies and related key technical solutions, including autonomous mapping, obstacle avoidance, advanced communication systems and joint missions SMRK and UAVs.
All these experiments with the simultaneous participation of several ground and air platforms are carried out in realistic external conditions characterized by complex terrain and a set of realistic tasks during which the capabilities of all components and systems are assessed. As part of these pilot programs (and the corresponding technology strategy) in the development of advanced SISM, the following areas were identified to maximize return on future investments:
- technology development will provide the technological basis for the subsystems and components and the corresponding integration into the SMRC prototypes for performance testing;
- leading companies in this area will develop advanced technologies needed to expand the scope of robotization, for example, by increasing the range of the SMRK and increasing the range of communication channels; and
- a risk reduction program will provide refinement of advanced technologies for a particular system and will allow to overcome some technological problems.
Thanks to the development of these technologies, SMRKs are potentially capable of providing a revolutionary leap forward in the military sphere, their use will reduce casualties and increase combat effectiveness. However, in order to achieve this, they must be able to work independently, including the implementation of complex tasks.


An example of armed SMRK. AVANTGUARD Israeli company G-NIUS Unmanned Ground Systems

Advanced modular robotic system MAARS (Modular Advanced Armed Robotic System), armed with a machine gun and grenade launchers
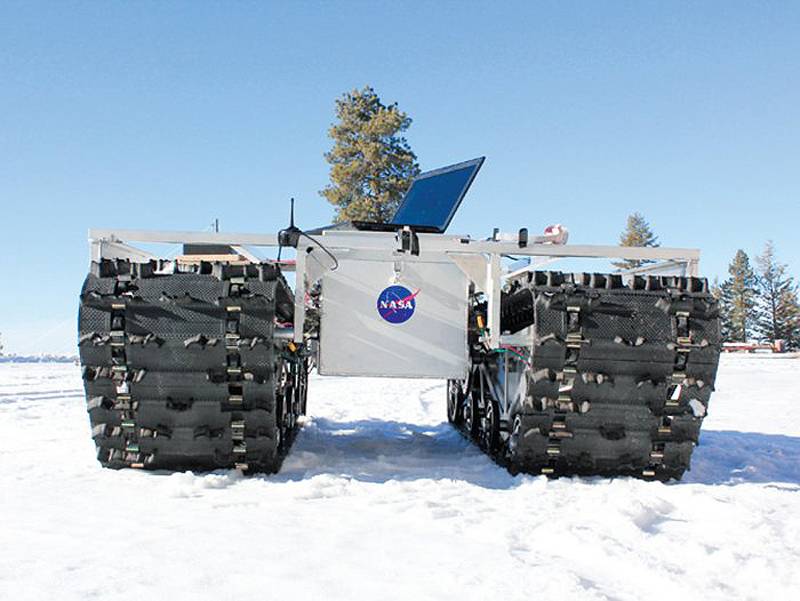
Designed by NASA SMRK GROVER on snowy terrain
Technical requirements for advanced SMRK
Advanced SMRC are designed and developed for military tasks and operate mainly in hazardous conditions. Today, many countries provide research and development in the field of robotic unmanned systems capable of working in most cases on rough terrain. Modern SMRCs can send video signals to the operator, information about obstacles, targets, and other variables that are interesting from a tactical point of view, or, in the case of the most advanced systems, make completely independent decisions. In fact, these systems can be semi-autonomous when navigation data is used along with on-board sensors and commands from a remote operator to determine the route. A fully autonomous vehicle determines its own course itself, using only onboard sensors to work out the route, but the operator always has the opportunity to make the necessary specific decisions and take control in critical situations or when the car is damaged.
Today modern SMRC can quickly detect, identify, localize and neutralize many types of threats, including the activity of the enemy in conditions of radiation, chemical or biological contamination on various types of terrain. When developing modern SMRK, the main problem is the creation of a functionally efficient design. The key points include the mechanical design, a set of on-board sensors and navigation systems, human-robot interaction, mobility, communication and power / power consumption.
The requirements for interaction between the robot and humans include highly complex human-machine interfaces and therefore multimodal technical solutions must be developed for safe and friendly interfaces. Modern technology of interaction between a robot and a person is very complex and will require a lot of tests and assessments in realistic operating conditions in order to achieve good levels of reliability, both in the interaction between humans and robots, and in the interaction between robots and robots.

Armed with SMRC development of the Estonian company MILREM
The goal of the designers is the successful development of the SMRC, capable of performing its task day and night on the complex on the terrain. In order to achieve maximum efficiency in each specific situation, the SMRC should be able to move on all types of terrain with obstacles at high speed, with high maneuverability and quickly change direction without a significant reduction in speed. Mobility related design parameters also include kinematic characteristics (primarily the ability to maintain contact with the ground in all conditions). SMRC has, in addition to the advantage that it does not have the limitations inherent in man, also the disadvantage of integrating complex mechanisms that can replace human movements. Design requirements for ride quality should be integrated with perception technologies, as well as with the development of sensors and software in order to obtain good mobility and ability to bypass various types of obstacles.
One of the extremely important requirements determining high mobility is the ability to use information about the natural environment (climbs, vegetation, stones or water), man-made objects (bridges, roads or buildings), weather and obstacles of the enemy (minefields or barriers). In this case, it becomes possible to determine their positions and positions of the enemy, and due to the use of a significant change in the speed and direction, the SMRK's chances of survival under enemy shelling increase significantly. Such technical characteristics make it possible to develop armed reconnaissance systems that can perform reconnaissance, surveillance and target detection tasks, fire missions in the presence of an armament complex, and also capable of detecting threats for their own defense (mines, enemy weapon systems, etc.).
All these combat capabilities should be realized in real time in order to avoid threats and neutralize the enemy using either their own weaponor channels of communication with remote weapons systems. High mobility and the ability to localize and track enemy targets and activity in difficult combat conditions is extremely important. To do this, it is necessary to develop intelligent SMRK capable of tracking enemy activity in real time using built-in integrated motion recognition algorithms.
Advanced features, including sensors, algorithms for combining data, active visualization and data processing, are very important and this requires a modern hardware and software architecture. When performing a task in modern SMRK, a GPS system, an inertial measurement unit, and an inertial navigation system are used to estimate the location.
Using the navigation data obtained through these systems, SMRK can independently move in accordance with the commands of the onboard program or remote control system. At the same time, SMRK is capable of sending navigation data to a remote control station at short intervals so that the operator knows about its exact location. Fully autonomous SMRK can plan their actions, and for this it is absolutely necessary to develop a route that eliminates collisions, while minimizing such fundamental parameters as time, energy and distance. A navigational computer and a computer with information can be used to create the optimal route and correct it (laser range finders and ultrasonic sensors can be used to effectively detect obstacles).
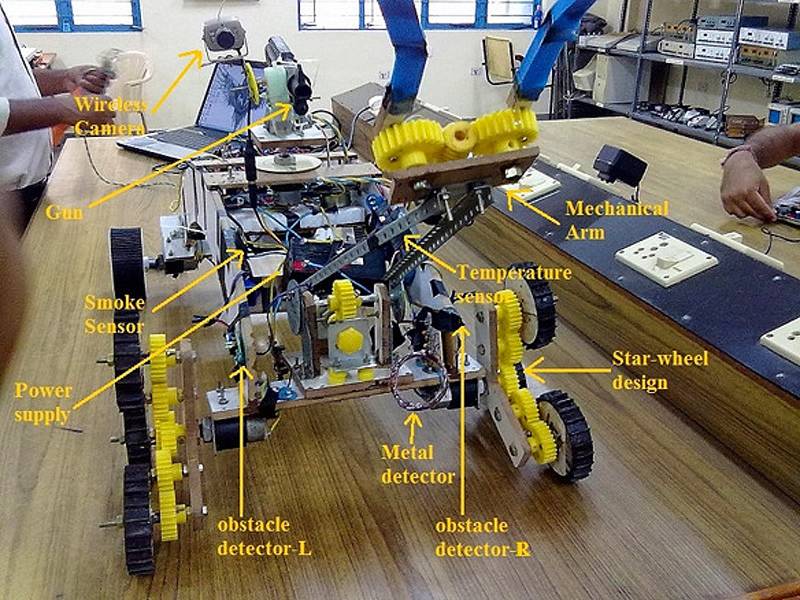
Components of a prototype armed SMRC, developed by Indian students
Design of navigation and communication systems
Another important problem in developing an effective SMRK is the design of a navigation / communication system. Digital cameras and sensors are installed to obtain visual feedback, while infrared systems are installed for operation at night; the operator can see the video on his computer and send some basic navigation commands to the SMRC (right / left, stop, forward) to adjust the navigation signals.
In the case of fully autonomous SMRK, visualization systems are integrated with navigation systems based on digital maps and GPS data. To create a completely autonomous SMRK, for such basic functions as, for example, navigation, integration of external perception systems, route planning and a communication channel will be required.
While the integration of navigation systems for single SMRK is at advanced stages, the development of algorithms for planning the simultaneous operation of several SMRC and joint tasks of SMRC and UAVs is at the initial stage, since it is very difficult to establish communication interaction of several robotic systems at once. Ongoing experiments will help determine which frequencies and frequency ranges are needed and how the requirements for a particular task will vary. Once these characteristics are determined, it will be possible to develop advanced functions and software for several robotic machines.

The unmanned K-MAX helicopter transports the SMSS (Squad Mission Support System) robotic vehicle during the autonomy tests; the pilot was in the K-MAX cockpit, but did not control it
Communication tools are very important for the functioning of the SMRK, but wireless solutions have quite significant drawbacks, since the established connection may be lost due to interference caused by the terrain, obstacles or activity of the enemy electronic suppression system. Recent developments in machine-to-machine communication systems are very interesting, and thanks to this research, affordable and efficient equipment for communication between robotic platforms can be created. The DRSC (Dedicated Short-Range Communication) special-purpose communication standard will be applied in real-life conditions for communication between SMRC and between SMRC and UAVs. Much attention is currently being paid to ensuring communication security in network-centric operations, and therefore future projects in the field of habitable and uninhabited systems should be based on advanced solutions that meet the standards of a common interface.
Today, the requirements for short-term tasks with low power consumption are mostly met, but there are problems with platforms that perform long-term tasks with high power consumption, in particular, streaming video is one of the most pressing problems.
Fuel
Energy source options depend on the type of system: for small SMRK, the energy source can be an advanced rechargeable battery, but for larger SMRC, the necessary energy can be generated by conventional fuel, which allows to realize a circuit with a new generation electric motor. The most obvious factors affecting the power supply are the external conditions, the mass and dimensions of the machine, as well as the time to complete the task. In some cases, the power supply system must consist of a fuel system as the primary source and a rechargeable battery (reduced visibility). The choice of the appropriate type of energy depends on all the factors that influence the execution of the task, and the energy source must provide the required mobility, uninterrupted operation of the communication system, sensor set and weapon system (if available).
In addition, it is necessary to solve technical problems associated with mobility on complex reliefs, the perception of obstacles and self-correction of erroneous actions. Within the framework of modern projects, new advanced robotized technologies have been developed regarding the integration of onboard sensors and data processing, route selection and navigation, detection, classification and avoidance of obstacles, as well as the elimination of errors associated with loss of communication and destabilization of the platform. For autonomous off-road navigation, it is necessary for the machine to distinguish the terrain, and this includes the 3D orography of the terrain (description of the terrain) and the identification of obstacles, such as stones, trees, non-flowing water bodies, etc. General capabilities are constantly increasing and today we can already speak about a fairly high level of defining the image of the terrain, but only in the daytime and in good weather, but the capabilities of robotic platforms in an unknown space and under bad weather conditions are still insufficient. In this regard, DARPA performs several experimental programs, where the capabilities of robotic platforms in unknown terrain are checked, in any weather, day and night. The DARPA program, called Applied Research in AI (applied research in the field of artificial intelligence), conducts research on intelligent decision-making tools and other advanced technological solutions for autonomous systems with a view to a specific application in advanced robotic systems, as well as autonomous multi-robot learning algorithms performing joint tasks, which will allow groups of robots to automatically process new tasks and redistribute roles among themselves.
As already mentioned, the operating conditions and the type of task determine the design of the modern SMRC, which is a mobile platform with a power source, sensors, computers and software architecture for perception, navigation, communication, training / adaptation, interaction between the robot and humans. In the future, they will be more multilateral, will have an increased level of unification and interaction, and will also be more effective from an economic point of view. Of particular interest are systems with a modular payload, which allows you to adapt machines for different tasks. In the next decade, robotic vehicles will become available to perform tactical operations and protect bases and other infrastructure based on an open architecture. They will be characterized by a significant level of uniformity and autonomy, high mobility and modular onboard systems.
SMRC technology for military use is developing rapidly, which will allow many armed forces to remove soldiers from dangerous tasks, including the detection and destruction of IEDs, reconnaissance, protection of their forces, demining and much more. For example, the concept of brigade fighting groups of the American army thanks to advanced computer modeling, combat training and the experience of real combat operations demonstrated that robotic vehicles increased the survivability of ground vehicles with crews and contributed to a significant increase in combat effectiveness. The development of promising technologies, such as mobility, autonomy, arming, man-machine interfaces, artificial intelligence for robotic systems, integration with other SMRK and habitable systems, will allow increasing the capabilities of uninhabited ground systems and their level of autonomy.


Russian shock robotic complex Platform – M developed by NITI Progress
Materials used:
www.defense-update.com
www.qinetiq.com
www.milrem.ee
www.darpa.mil
www.airforce.com
www.niti-progress.ru
www.wikipedia.org
en.wikipedia.org
Information