Unobtrusive deck UAV
When on the testing grounds of the West there is a successful demonstration of the newest drone unmanned technology, in the Russian Ministry of Defense, the level of unpunished theft is already exceeding billions of dollars. Paradoxically, but the fact is: the greater the level of theft in the military and defense industry of Russia, the more in the minds of some of the representatives of the military-industrial leadership of the country are optimism and determination to "catch up and overtake America" in the breakthrough areas of science and technology, which radically affect on the development of the latest military technology.

The end of 2012 was very successful for the US Navy and Northrop Grumman. In the program for creating the UCLASS (Unmanned Carrier Launched Airborne Surveillance and Strike) carrier-based reconnaissance and strike aircraft complex (RUAC), the next stages have been worked out, bringing the developers closer to the start of flight tests of demonstrators of this system on an aircraft carrier in 2013. For this, two prototypes (AV-1 and AV-2) of the X-47B unmanned aerial vehicle (UAV) are being created, developed by Northrop Grumman and representing today the most advanced experimental unmanned platforms that serve as the prototype of those promising RUAC, which in 10 years may appear in the compositions of deck aviation groups based on nuclear-powered aircraft carriers of the US Navy.
New Pentagon drone
In the mid-90s, the Pentagon began to work on the concept of a UAV, designed mainly for combat missions. The US Air Force and Navy have launched two separate percussion demonstrator programs. drones type UCAV (Unmanned Aerial Combat Vehicle). For the Air Force, Boeing developed the X-45 demonstrator, and for the Navy fleet this program was designated UCAV-N (Unmanned Aerial Combat Vehicle - Navy), in which Northrop Grumman and Boeing worked on two separate competing projects - the X-47 Pegasus and X-46, respectively. However, in June 2003, the U.S. Defense Department decided to combine the two concepts for the Air Force and Navy into one J-UCAS (Joint Unmanned Combat Air System) program under the leadership of the Defense Advanced Research Projects Agency (DARPA). The purpose of such a merger and transformation of the work was the need to create a universal offensive system in which the aviation and ground components would be adapted to perform special combat missions. Then, in December 2004, DARPA was instructed to transfer the management of all J-UCAS resources to the US Air Force. However, all rearrangements and transformations did not give a positive result, and this direction was closed in 2006. By that time, the costs of the R&D program exceeded $ 1,45 billion, making it one of the most expensive unmanned aerial vehicles ever sold by the Pentagon.
However, the Navy did not abandon the idea of introducing new types of aircraft into the compositions of their already powerful naval aviation groups and in May 2010 made a request for information on the UCAV deck UAV, which was later called UCLASS, for leading US defense corporations. The idea that occupied the heads of the US naval strategists was as follows. It took an unobtrusive reconnaissance-strike complex capable, by the end of 2018, to operate in conjunction with manned deck aircraft as part of the aircraft carrier aircraft group. The proposed RUAC consisting of four to six UAVs should act autonomously with the CVN-68 Nimitz and Gerald Ford CVN-78 aircraft carriers, be in the air without refueling 11 – 14 hours, and also be able to replenish the fuel from aircraft refueling on the systems "hose-cone" or "filling rod-fuel receiver".
An important distinctive feature of the UCLASS system was its mission to operate in the airspace well protected by air defense systems, which means that the UAV should have a low level of radar visibility by analogy with the deck version of the fifth-generation F-35C fighter.
Contracts for the development of this concept of the Navy were given to the companies General Atomix Aeronautical Systems, Lockheed Martin and Northrop Grumman.
But now we are more interested in the X-47B concept proposed by Northrop Grumman, since its two demonstrators are built, fly and are preparing for test flights on the nuclear aircraft carrier Harry Truman. The company received a contract from the Navy to produce a model of an unmanned Combat Aircraft System Demonstrator unmanned aerial system (UCAS-D) in August 2007. As part of the development program and flight tests of two X-47B demonstrators with fighter dimensions, the necessary experience will be obtained, which is planned to be used in the subsequent competitive program to create for the US Navy a deck-based unmanned RUAK UCLASS.
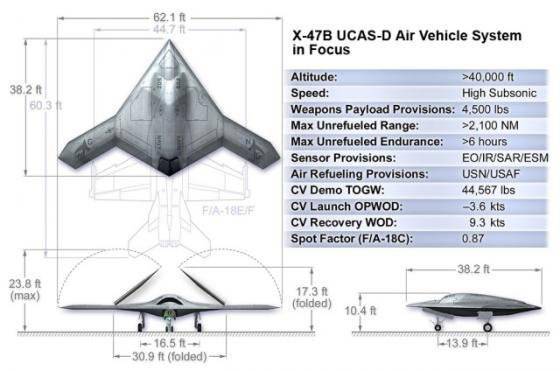
The X-47B version is an improved version of the X-47A UCAV-N device, is made by the tailless aerodynamic design, has a length of 11 meters and a wingspan of 18,9 meter. Increasing the wing span in combination with the Pratt & Whitney F100-220U turbojet engine allows the model to be in the air for nine hours and provides 2960 kilometers distance. Consoles of the delta wing of the device are made folding, which reduces its size and provides basing on the aircraft carrier.

Sea version
The first successful flight of the X-47B was performed in February 2011 of the year at the Dryden Flight Test Center at the Edwards (California) base of the US Air Force and then in June 2012 was sent to the Naval Air Station Patuxent River (Maryland) for carrying out the next stage of testing.
A month later, on July 29, there was a second flight there. As reported by the command of the aviation systems of the naval forces, the UAV demonstrator took off from the airfield and was in the air 35 minutes, the altitude 2300 meters and the speed 330 kilometers per hour were reached.
This flight over the Chesapeake Bay opened the flight test program X-47B, in which the compatibility of the model with the standard flight procedures on the deck and its landing equipment must be confirmed. The airspace here allows UAV developers to conduct test flights without any restrictions until the transfer of the flight program to the aircraft carrier in the 2013 year.
One of the test complexes at the aviation station simulates the conditions of the aircraft carrier and allows developers to verify that the UAV is ready for testing at sea, in particular, to test the possibility of a takeoff with the help of a catapult and accurate approach and landing with an aero-finisher until the actual tests on the deck are performed.
At the end of November of this year, the first launch of the X-47B was carried out on the Patuxent River using a coastal land-based steam catapult, after which the device performed a test flight over the Chesapeake Bay. The flight mission provided for the execution of several maneuvers that simulate a UAV flight program when landing on the deck of an aircraft carrier on the desired glide path. According to Darel Martis, flight test director of the UCAS-D demonstrator at Northrop Grumman, this launch is a very important step in the test program, because the ability to precisely control the device using a wireless CDU (Remote Control Unit), which will play an important role in future operations with X-47B on the ship. Among these operations are the taxiing of the UAV, its movement to the deck catapult and coupling with it, uncoupling from the aerofinisher after landing and quick exit from the landing deck.
The combined team of naval specialists and the Northrop Grumman development company will continue ground flights for the next few weeks before the launch of the second X-47B UAV demonstrator aboard the atomic aircraft carrier CVN-75 Harry Harman. These works will be carried out until the end of the year, and in 2013, it is planned to start flights from the deck, continuing them in 2014 year with flight tests for autonomous refueling of X-47B in the air using the AAR program (Autonomous Air Refueling) using a refueling rod and cone.
In the course of this program, the technologies necessary for the subsequent creation of the low-profile unmanned deckless RUAK will be consistently tested. By 2020, the Navy plans to begin operation on the aircraft carrier of the first squadron of reconnaissance-strike UAVs, having the dimensions of a deck fighter.
At the initial stage of the December deck tests of the X-47B demonstrator, it is planned to verify the device’s compatibility with the standard operations conducted with the aircraft group based on the aircraft carrier. To do this, the ship is equipped with the appropriate equipment and software. In accordance with the program of the command of the aviation systems of the US Navy, the UAVs will perform various taxiing on the deck of an aircraft carrier, as well as other operations.
The X-47B flight demonstration tests scheduled for the 2013 year include the UCAS-D demonstrator taking off and landing on the deck of an aircraft carrier, locating the vehicle in the airspace controlled by the aircraft’s air traffic control service, and conducting other regular operations with this model.
As part of the UCAS-D program, it is planned to test by 2013 the possibility of an autonomous, inconspicuous X-47B demonstrator to operate safely from an aircraft carrier, including take-off and landing, after which its autonomous refueling in the air will be carried out in the 2014-m.
In anticipation of sea trials, the developers tested the control of the device on the deck of the ship using a wireless hand-held display device CDU (Control Display Unit), which will allow operators to maneuver the UAV on an aircraft carrier via remote control. The work was carried out in early November at the US Naval Air Station Patuxent River and demonstrated the ability to safely maneuver the device on a deck filled with other aircraft, with wireless control. The test program provided for controlling the thrust of the UAV engine, performing ground taxiing, exiting the device to the catapult and connecting with it, as well as moving drone in the simulated landing zone after the landing is completed.
The deck operator X-47B will work in tandem with the head of the flight deck of an aircraft carrier when performing operations to change its position on the ship using a CDU device. The flight leader will use traditional hand commands to show how the unit can move along the deck. The operator with the control device plans to be behind the flight director and use the CDU to duplicate manual commands and transmit them to the UAV in digital form via a wireless link.
Other tasks that X-47B should perform in the air are also being successfully developed. In particular, a series of flight tests was conducted to demonstrate the technology that can help increase the range and duration of the flight of prospective drone deck-based UAVs when performing reconnaissance or strike operations.
These tests demonstrated the capabilities of the hardware and software created that can help X-47B perform autonomous refueling in the air of AAR (Autonomous Aerial Refueling) in 2014 year. As the Northrop Grumman company reported, during the flight tests of the AAR program, the functions of the X-47B drone BLAH were performed by its simulator - the plane “Lidzhet” of the Kalspan company. The aircraft K707 of Omega Air Reefwell Company was used as a tanker. Demonstrated the possibility of refueling with two methods used by the US Navy and Air Force. In the first case, it was a “hose-cone” system, and in the second, the reception of fuel from other devices using a fuel rod. In tests, the transfer of fuel in the air between the aircraft was not carried out.
On the "Lirjet" were installed functional equivalents of the navigation system, the flight control system processor and the forward hemisphere review system, which the X-47B will use when conducting refueling operations in the air. The aircraft did not have a filling neck or a receiver. The K707 was almost identical to the US Air Force KC-135 aircraft and is equipped with a filling cone.
At each training session of refueling in the air, the simulator of the “Lidzhet” UAV was removed to remove approximately 1,6 kilometers from the tanker. The pilot then transferred control of the aircraft to the on-board processor from the X-47B, providing autonomous flight control and controlling the aircraft simulator during the test.
During a regular “refueling” operation, the operator onboard K707 or the flight leader on the ground issued commands to the “Lirjet” when passing each main position when refueling in the air: monitoring the position of the contact behind the tanker when refueling, position after refueling.
Onboard the X-47B, a hybrid satellite-visual navigation system will be used in conjunction with an autonomous flight control system, which will allow determining and accurately maintaining the distance between the tanker and the unit being refueled.
Northrop Grumman and the Navy plan to conduct additional tests on the AAR program using the same aircraft, when the X-47B hardware and software tested in flight tests are ready.

European equivalent
The implementation of the program to create drone UAVs in the United States is under the scrutiny of leading European aerospace companies. No one in Europe wants the United States to go a long way to create the latest technologies that will be in demand in future military conflicts. At present, the defense industry of France and Germany is trying to prevent the purchase of American drums MQ-9 "Ripper" (Reaper) of the company "General Atomics" (General Atomics). These two European countries are considering the joint acquisition of a lot of this model for further joint use. However, the available funds that are intended for the purchase of American UAVs, in all likelihood, can be withdrawn from the program to finance the development of the European drone, which will put it in a difficult position. To demonstrate to the governments of their countries the readiness of similar technologies in the field of military unmanned vehicles, as well as to put some pressure on the military-political leadership of France and Germany, December 1 2012 of the year on the French Istries test site the long-awaited first flight of the demonstrator of the European drone UAV Neuron was conducted .
The lead contractor for this program, the French aircraft manufacturing firm Dassault Aviation (Dassault Aviation), as well as a group of subcontracting companies from five European countries, hope that the first flight of Neuron will serve as a kind of catalyst and will force the governments of the countries participating in the project to combine efforts and coordinate their actions in the development of its own unmanned vehicle. The first step in this direction could be the decision to build a new model, the Neuron-2, which would have a more advanced configuration and would allow intensive troop testing of the capabilities of a prospective attack UAV.
In addition to the Neuron program, Dassault Aviation, in conjunction with the British BAE Systems (BAE Systems), will explore the possibility of creating a promising Anglo-French combat UAV, as well as a medium-length drone of the MALE type (Medium-Altitude Long-Endurance ).
The Neuron UAV performed the first flight lasting 25 minutes, in which the following basic steps were evaluated: automatic taxiing of the vehicle along the runway, keeping it in the middle of the runway, taking off, landing and landing, running along a lane at high speed, performance in the air of various turns, climb, gentle dive. The tests were conducted in the range of possible flight regimes, and the speed of the device reached 277 kilometers per hour, and the height - 610 meters.
Now the model is planned to be transferred to the Center for Electronics of Weapons Systems (Center de l'Electronique de l'Armement) of the General Delegation for Armaments of France DGA for conducting four-month studies of its demasking signs in various ranges of the electromagnetic spectrum (radar, infrared, ultraviolet, optical, etc.) in a special anechoic chamber. After the completion of this work, the UAV will be returned to Istres, where in April 2013 will begin the program of its flight tests, which in the middle of the 2014 will end with the dropping of guided bombs from the internal weapons compartment. Bombing in a simulated combat scenario is planned to be carried out on a ground target detected, identified and captured to accompany an optical-electronic and infrared onboard drone sensors. The device is being prepared for testing not only in France, but also in Sweden and Italy, and each time the test sites will measure its level of visibility in different ranges of the electromagnetic spectrum when working with national air defense systems and other weapons systems. In total, during the flight tests, the Neuron UAV will perform about one hundred flights, each of which will be at least one hour in duration.
The Neuron drone technology demonstrator technology creation program was announced in 2003, and the corresponding contract worth about 400 million euros was issued at the end of 2005. Approximately half of this amount came to France (Dassault Aviation and Thales), while the remaining funds were distributed among other program participants: Greece (HAI), Italy (Alenia Aermacchi), Sweden (SAAB), Spain (EADS-CASA), Switzerland (RUAG).
Control over the implementation of the program is entrusted to the General Directorate of Armaments of France DGA, the lead contractor is Dassault Aviation, which subcontracts directly with its industrial partners. The organization of work does not provide for duplication, the contracted works are designed to use only those know-how that are already in the scientific and technical reserves of the program participants, and not to promising developments. This approach, as experts note, is fundamentally new for European joint programs and ensures financial and technological discipline during the project implementation.
Unlike most other UAVs that are already in operation, the Neuron is not a remote-controlled vehicle, but performs a preprogrammed task without entering any additional commands from the ground. The role of the ground operator is to observe the progress of the flight and to confirm each successful stage, although if necessary it can enter the command loop and take control.
Fully autonomous UAV flight is considered by the project participants as the most optimal in combat conditions, since this will allow the combat drone to perform the task even if the command data line is disabled by intense interference. In the case of remote-controlled aircraft type RPV (Remotely-Piloted Vehicle), they are programmed for a vertical dive and destruction when striking the ground in case of failure of the flight control channel.
The mass of the "Neuron": dry - five, the payload - two (fuel and weapons) and the maximum take-off - seven tons. The device can be in the air for about three hours, flying at a speed corresponding to the number M = 0,8, at altitudes up to 3000 meters.
Regarding the level of visibility of the UAV, the official representatives of Dassault Aviation compared it with the boom, noting that the magnitude of the effective dispersion surface will be explored from different angles during the next 18 test months.
Read more: http://vpk-news.ru/articles/13673

The end of 2012 was very successful for the US Navy and Northrop Grumman. In the program for creating the UCLASS (Unmanned Carrier Launched Airborne Surveillance and Strike) carrier-based reconnaissance and strike aircraft complex (RUAC), the next stages have been worked out, bringing the developers closer to the start of flight tests of demonstrators of this system on an aircraft carrier in 2013. For this, two prototypes (AV-1 and AV-2) of the X-47B unmanned aerial vehicle (UAV) are being created, developed by Northrop Grumman and representing today the most advanced experimental unmanned platforms that serve as the prototype of those promising RUAC, which in 10 years may appear in the compositions of deck aviation groups based on nuclear-powered aircraft carriers of the US Navy.
New Pentagon drone
In the mid-90s, the Pentagon began to work on the concept of a UAV, designed mainly for combat missions. The US Air Force and Navy have launched two separate percussion demonstrator programs. drones type UCAV (Unmanned Aerial Combat Vehicle). For the Air Force, Boeing developed the X-45 demonstrator, and for the Navy fleet this program was designated UCAV-N (Unmanned Aerial Combat Vehicle - Navy), in which Northrop Grumman and Boeing worked on two separate competing projects - the X-47 Pegasus and X-46, respectively. However, in June 2003, the U.S. Defense Department decided to combine the two concepts for the Air Force and Navy into one J-UCAS (Joint Unmanned Combat Air System) program under the leadership of the Defense Advanced Research Projects Agency (DARPA). The purpose of such a merger and transformation of the work was the need to create a universal offensive system in which the aviation and ground components would be adapted to perform special combat missions. Then, in December 2004, DARPA was instructed to transfer the management of all J-UCAS resources to the US Air Force. However, all rearrangements and transformations did not give a positive result, and this direction was closed in 2006. By that time, the costs of the R&D program exceeded $ 1,45 billion, making it one of the most expensive unmanned aerial vehicles ever sold by the Pentagon.
However, the Navy did not abandon the idea of introducing new types of aircraft into the compositions of their already powerful naval aviation groups and in May 2010 made a request for information on the UCAV deck UAV, which was later called UCLASS, for leading US defense corporations. The idea that occupied the heads of the US naval strategists was as follows. It took an unobtrusive reconnaissance-strike complex capable, by the end of 2018, to operate in conjunction with manned deck aircraft as part of the aircraft carrier aircraft group. The proposed RUAC consisting of four to six UAVs should act autonomously with the CVN-68 Nimitz and Gerald Ford CVN-78 aircraft carriers, be in the air without refueling 11 – 14 hours, and also be able to replenish the fuel from aircraft refueling on the systems "hose-cone" or "filling rod-fuel receiver".
An important distinctive feature of the UCLASS system was its mission to operate in the airspace well protected by air defense systems, which means that the UAV should have a low level of radar visibility by analogy with the deck version of the fifth-generation F-35C fighter.
Contracts for the development of this concept of the Navy were given to the companies General Atomix Aeronautical Systems, Lockheed Martin and Northrop Grumman.
But now we are more interested in the X-47B concept proposed by Northrop Grumman, since its two demonstrators are built, fly and are preparing for test flights on the nuclear aircraft carrier Harry Truman. The company received a contract from the Navy to produce a model of an unmanned Combat Aircraft System Demonstrator unmanned aerial system (UCAS-D) in August 2007. As part of the development program and flight tests of two X-47B demonstrators with fighter dimensions, the necessary experience will be obtained, which is planned to be used in the subsequent competitive program to create for the US Navy a deck-based unmanned RUAK UCLASS.
The X-47B version is an improved version of the X-47A UCAV-N device, is made by the tailless aerodynamic design, has a length of 11 meters and a wingspan of 18,9 meter. Increasing the wing span in combination with the Pratt & Whitney F100-220U turbojet engine allows the model to be in the air for nine hours and provides 2960 kilometers distance. Consoles of the delta wing of the device are made folding, which reduces its size and provides basing on the aircraft carrier.
Sea version
The first successful flight of the X-47B was performed in February 2011 of the year at the Dryden Flight Test Center at the Edwards (California) base of the US Air Force and then in June 2012 was sent to the Naval Air Station Patuxent River (Maryland) for carrying out the next stage of testing.
A month later, on July 29, there was a second flight there. As reported by the command of the aviation systems of the naval forces, the UAV demonstrator took off from the airfield and was in the air 35 minutes, the altitude 2300 meters and the speed 330 kilometers per hour were reached.
This flight over the Chesapeake Bay opened the flight test program X-47B, in which the compatibility of the model with the standard flight procedures on the deck and its landing equipment must be confirmed. The airspace here allows UAV developers to conduct test flights without any restrictions until the transfer of the flight program to the aircraft carrier in the 2013 year.
One of the test complexes at the aviation station simulates the conditions of the aircraft carrier and allows developers to verify that the UAV is ready for testing at sea, in particular, to test the possibility of a takeoff with the help of a catapult and accurate approach and landing with an aero-finisher until the actual tests on the deck are performed.
At the end of November of this year, the first launch of the X-47B was carried out on the Patuxent River using a coastal land-based steam catapult, after which the device performed a test flight over the Chesapeake Bay. The flight mission provided for the execution of several maneuvers that simulate a UAV flight program when landing on the deck of an aircraft carrier on the desired glide path. According to Darel Martis, flight test director of the UCAS-D demonstrator at Northrop Grumman, this launch is a very important step in the test program, because the ability to precisely control the device using a wireless CDU (Remote Control Unit), which will play an important role in future operations with X-47B on the ship. Among these operations are the taxiing of the UAV, its movement to the deck catapult and coupling with it, uncoupling from the aerofinisher after landing and quick exit from the landing deck.
The combined team of naval specialists and the Northrop Grumman development company will continue ground flights for the next few weeks before the launch of the second X-47B UAV demonstrator aboard the atomic aircraft carrier CVN-75 Harry Harman. These works will be carried out until the end of the year, and in 2013, it is planned to start flights from the deck, continuing them in 2014 year with flight tests for autonomous refueling of X-47B in the air using the AAR program (Autonomous Air Refueling) using a refueling rod and cone.
In the course of this program, the technologies necessary for the subsequent creation of the low-profile unmanned deckless RUAK will be consistently tested. By 2020, the Navy plans to begin operation on the aircraft carrier of the first squadron of reconnaissance-strike UAVs, having the dimensions of a deck fighter.
At the initial stage of the December deck tests of the X-47B demonstrator, it is planned to verify the device’s compatibility with the standard operations conducted with the aircraft group based on the aircraft carrier. To do this, the ship is equipped with the appropriate equipment and software. In accordance with the program of the command of the aviation systems of the US Navy, the UAVs will perform various taxiing on the deck of an aircraft carrier, as well as other operations.
The X-47B flight demonstration tests scheduled for the 2013 year include the UCAS-D demonstrator taking off and landing on the deck of an aircraft carrier, locating the vehicle in the airspace controlled by the aircraft’s air traffic control service, and conducting other regular operations with this model.
As part of the UCAS-D program, it is planned to test by 2013 the possibility of an autonomous, inconspicuous X-47B demonstrator to operate safely from an aircraft carrier, including take-off and landing, after which its autonomous refueling in the air will be carried out in the 2014-m.
In anticipation of sea trials, the developers tested the control of the device on the deck of the ship using a wireless hand-held display device CDU (Control Display Unit), which will allow operators to maneuver the UAV on an aircraft carrier via remote control. The work was carried out in early November at the US Naval Air Station Patuxent River and demonstrated the ability to safely maneuver the device on a deck filled with other aircraft, with wireless control. The test program provided for controlling the thrust of the UAV engine, performing ground taxiing, exiting the device to the catapult and connecting with it, as well as moving drone in the simulated landing zone after the landing is completed.
The deck operator X-47B will work in tandem with the head of the flight deck of an aircraft carrier when performing operations to change its position on the ship using a CDU device. The flight leader will use traditional hand commands to show how the unit can move along the deck. The operator with the control device plans to be behind the flight director and use the CDU to duplicate manual commands and transmit them to the UAV in digital form via a wireless link.
Other tasks that X-47B should perform in the air are also being successfully developed. In particular, a series of flight tests was conducted to demonstrate the technology that can help increase the range and duration of the flight of prospective drone deck-based UAVs when performing reconnaissance or strike operations.
These tests demonstrated the capabilities of the hardware and software created that can help X-47B perform autonomous refueling in the air of AAR (Autonomous Aerial Refueling) in 2014 year. As the Northrop Grumman company reported, during the flight tests of the AAR program, the functions of the X-47B drone BLAH were performed by its simulator - the plane “Lidzhet” of the Kalspan company. The aircraft K707 of Omega Air Reefwell Company was used as a tanker. Demonstrated the possibility of refueling with two methods used by the US Navy and Air Force. In the first case, it was a “hose-cone” system, and in the second, the reception of fuel from other devices using a fuel rod. In tests, the transfer of fuel in the air between the aircraft was not carried out.
On the "Lirjet" were installed functional equivalents of the navigation system, the flight control system processor and the forward hemisphere review system, which the X-47B will use when conducting refueling operations in the air. The aircraft did not have a filling neck or a receiver. The K707 was almost identical to the US Air Force KC-135 aircraft and is equipped with a filling cone.
At each training session of refueling in the air, the simulator of the “Lidzhet” UAV was removed to remove approximately 1,6 kilometers from the tanker. The pilot then transferred control of the aircraft to the on-board processor from the X-47B, providing autonomous flight control and controlling the aircraft simulator during the test.
During a regular “refueling” operation, the operator onboard K707 or the flight leader on the ground issued commands to the “Lirjet” when passing each main position when refueling in the air: monitoring the position of the contact behind the tanker when refueling, position after refueling.
Onboard the X-47B, a hybrid satellite-visual navigation system will be used in conjunction with an autonomous flight control system, which will allow determining and accurately maintaining the distance between the tanker and the unit being refueled.
Northrop Grumman and the Navy plan to conduct additional tests on the AAR program using the same aircraft, when the X-47B hardware and software tested in flight tests are ready.
European equivalent
The implementation of the program to create drone UAVs in the United States is under the scrutiny of leading European aerospace companies. No one in Europe wants the United States to go a long way to create the latest technologies that will be in demand in future military conflicts. At present, the defense industry of France and Germany is trying to prevent the purchase of American drums MQ-9 "Ripper" (Reaper) of the company "General Atomics" (General Atomics). These two European countries are considering the joint acquisition of a lot of this model for further joint use. However, the available funds that are intended for the purchase of American UAVs, in all likelihood, can be withdrawn from the program to finance the development of the European drone, which will put it in a difficult position. To demonstrate to the governments of their countries the readiness of similar technologies in the field of military unmanned vehicles, as well as to put some pressure on the military-political leadership of France and Germany, December 1 2012 of the year on the French Istries test site the long-awaited first flight of the demonstrator of the European drone UAV Neuron was conducted .
The lead contractor for this program, the French aircraft manufacturing firm Dassault Aviation (Dassault Aviation), as well as a group of subcontracting companies from five European countries, hope that the first flight of Neuron will serve as a kind of catalyst and will force the governments of the countries participating in the project to combine efforts and coordinate their actions in the development of its own unmanned vehicle. The first step in this direction could be the decision to build a new model, the Neuron-2, which would have a more advanced configuration and would allow intensive troop testing of the capabilities of a prospective attack UAV.
In addition to the Neuron program, Dassault Aviation, in conjunction with the British BAE Systems (BAE Systems), will explore the possibility of creating a promising Anglo-French combat UAV, as well as a medium-length drone of the MALE type (Medium-Altitude Long-Endurance ).
The Neuron UAV performed the first flight lasting 25 minutes, in which the following basic steps were evaluated: automatic taxiing of the vehicle along the runway, keeping it in the middle of the runway, taking off, landing and landing, running along a lane at high speed, performance in the air of various turns, climb, gentle dive. The tests were conducted in the range of possible flight regimes, and the speed of the device reached 277 kilometers per hour, and the height - 610 meters.
Now the model is planned to be transferred to the Center for Electronics of Weapons Systems (Center de l'Electronique de l'Armement) of the General Delegation for Armaments of France DGA for conducting four-month studies of its demasking signs in various ranges of the electromagnetic spectrum (radar, infrared, ultraviolet, optical, etc.) in a special anechoic chamber. After the completion of this work, the UAV will be returned to Istres, where in April 2013 will begin the program of its flight tests, which in the middle of the 2014 will end with the dropping of guided bombs from the internal weapons compartment. Bombing in a simulated combat scenario is planned to be carried out on a ground target detected, identified and captured to accompany an optical-electronic and infrared onboard drone sensors. The device is being prepared for testing not only in France, but also in Sweden and Italy, and each time the test sites will measure its level of visibility in different ranges of the electromagnetic spectrum when working with national air defense systems and other weapons systems. In total, during the flight tests, the Neuron UAV will perform about one hundred flights, each of which will be at least one hour in duration.
The Neuron drone technology demonstrator technology creation program was announced in 2003, and the corresponding contract worth about 400 million euros was issued at the end of 2005. Approximately half of this amount came to France (Dassault Aviation and Thales), while the remaining funds were distributed among other program participants: Greece (HAI), Italy (Alenia Aermacchi), Sweden (SAAB), Spain (EADS-CASA), Switzerland (RUAG).
Control over the implementation of the program is entrusted to the General Directorate of Armaments of France DGA, the lead contractor is Dassault Aviation, which subcontracts directly with its industrial partners. The organization of work does not provide for duplication, the contracted works are designed to use only those know-how that are already in the scientific and technical reserves of the program participants, and not to promising developments. This approach, as experts note, is fundamentally new for European joint programs and ensures financial and technological discipline during the project implementation.
Unlike most other UAVs that are already in operation, the Neuron is not a remote-controlled vehicle, but performs a preprogrammed task without entering any additional commands from the ground. The role of the ground operator is to observe the progress of the flight and to confirm each successful stage, although if necessary it can enter the command loop and take control.
Fully autonomous UAV flight is considered by the project participants as the most optimal in combat conditions, since this will allow the combat drone to perform the task even if the command data line is disabled by intense interference. In the case of remote-controlled aircraft type RPV (Remotely-Piloted Vehicle), they are programmed for a vertical dive and destruction when striking the ground in case of failure of the flight control channel.
The mass of the "Neuron": dry - five, the payload - two (fuel and weapons) and the maximum take-off - seven tons. The device can be in the air for about three hours, flying at a speed corresponding to the number M = 0,8, at altitudes up to 3000 meters.
Regarding the level of visibility of the UAV, the official representatives of Dassault Aviation compared it with the boom, noting that the magnitude of the effective dispersion surface will be explored from different angles during the next 18 test months.
Read more: http://vpk-news.ru/articles/13673
Information