Evolution of control systems of early Soviet spacecraft

Model of "Sputnik-1" with a demonstration of internal devices. Photo of the Museum of Cosmonautics
It is difficult to imagine a modern spacecraft, disposable or reusable, domestic or foreign, without a complex control system built on the basis of high-performance computers. However, this was not always the case. Early Soviet-designed spacecraft did not have any control systems at all. Then the first simple devices appeared on the devices, and their further evolution led to the emergence of full-fledged multifunctional computers.
Along a predetermined path
Domestic and foreign probes and devices used in early experiments and research in the field of rocket and space technology did not have full-fledged control systems. On board there were automation devices for individual units and systems, but the possibility of full-fledged flight control was not provided. Moreover, at that time there was no need for them.
For example, the first artificial Earth satellite SP-1 (Sputnik-1), launched in October 1957, had a battery pack, a radio transmitter, a set of sensors and cooling equipment on board. There were no devices for determining coordinates and position in space, as well as flight control. The satellite was supposed to move along the trajectory determined when it was launched.

Model of "Sputnik-2". In the lower case there was a "cabin" with a place for a dog. Photo by Wikimedia Commons
The next Sputnik-2 was built according to a similar principle, the payload of which was the container with the dog Laika. On board there were instruments only for collecting and transmitting data on the state of the animal. However, the automation of some processes, such as the cooling of a habitable container, was also envisaged.
Remote control
Even at the stage of preliminary study, it became clear that promising space technology should have certain means of control. Independently or on commands from the Earth, satellites must turn on instruments, conduct research, and so on. Such design problems were solved already by the beginning of 1958 when creating the next spacecraft.
In May 1958, Sputnik-3 or object D went into orbit. For the first time in domestic practice, this device received the means of automatic and remote control. The onboard instrumentation complex could receive and execute commands from the ground control station. There were 12 scientific instruments for various purposes on board, which were switched on and off by command or by an onboard time-program device. In addition, in certain parts of the orbit, where there was no connection with the Earth, telemetry recording on magnetic tape was automatically turned on. After the connection was restored, the recorded information was transmitted.
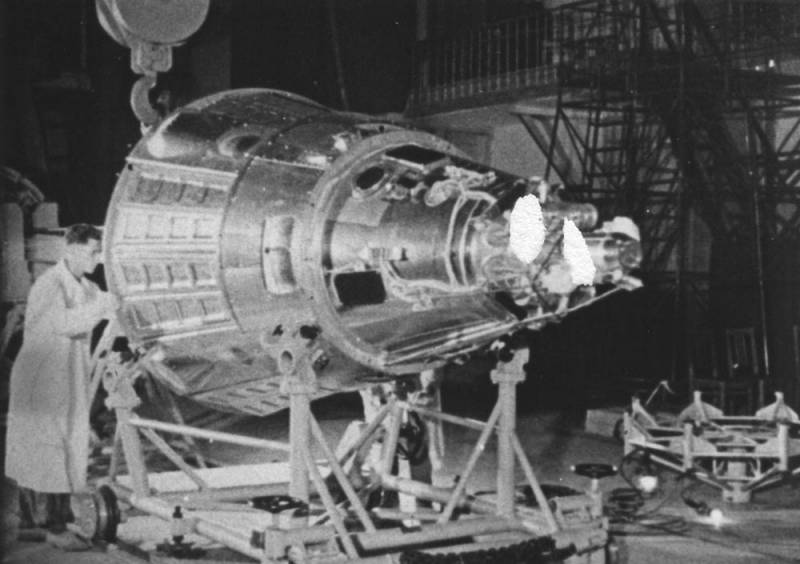
"Sputnik-3" / "D" at the assembly stage. Photo by RGANTD
Soon, radio command remote control was used in the field of interplanetary research. Beginning in the autumn of 1958, the USSR made several attempts to send automatic interplanetary stations to the Moon. The first launches ended in accidents, and only in January 1959, the Luna-1 AMS was able to pass close to the natural satellite of the Earth. In September of the same year, the Luna-2 spacecraft landed on the moon for the first time - hard, with the destruction of the structure.
On board the early Luna products there was a set of measuring instruments for various purposes, devices for monitoring their operation, as well as a radio station for receiving commands and transmitting telemetry. For the flight to the Moon, stations were installed on the so-called. block "E" - the third stage of the carrier rocket "Vostok-L" with the possibility of remote control. The unit was responsible for bringing the AMS to the calculated trajectory.
After the launch, the flight of the Vostok-L rocket with the Luna was tracked from the ground by radar equipment, originally created for testing ballistic missiles. Trajectory data were received and processed by a special computer system based on the BESM-2 machine. When the product "E" with the "Moon" deviated from the optimal trajectory, the complex formed and transmitted commands to it to correct the trajectory. In general, such a system performed well, although there were errors.
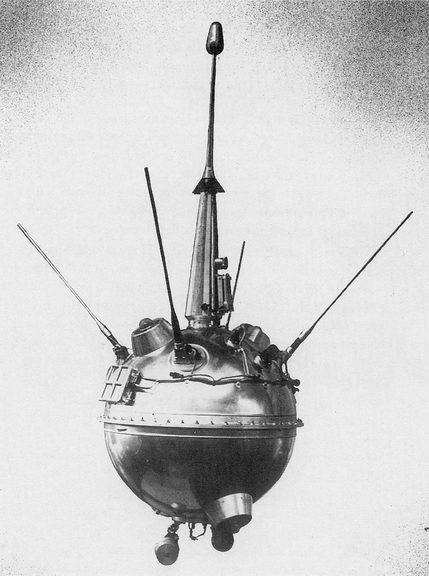
Automatic station "Luna-2". Photo by Wikimedia Commons
New opportunities
Early spacecraft could fly only along a pre-calculated trajectory, which was launched by a launch vehicle or upper stage. For the further development of space programs, it was necessary to develop some control tools that would allow the apparatus to be oriented in space and perform maneuvers.
The first successes in this direction were obtained during the development of the Luna-3 AMS, which was successfully launched in October 1959. An original Chaika phototelemetric orientation system was created for this station. It included optical elements that determined the position of the Sun and Moon relative to the AMS, a computing device and shunting engines. The scientific equipment of the station, as before, worked according to the established program or commands from the control center.
It was the presence of the "Chaika" system that allowed "Luna-3" to photograph the natural satellite of the Earth, incl. its reverse side. In the future, developments on this system and its main ideas were actively used in other space technology projects.
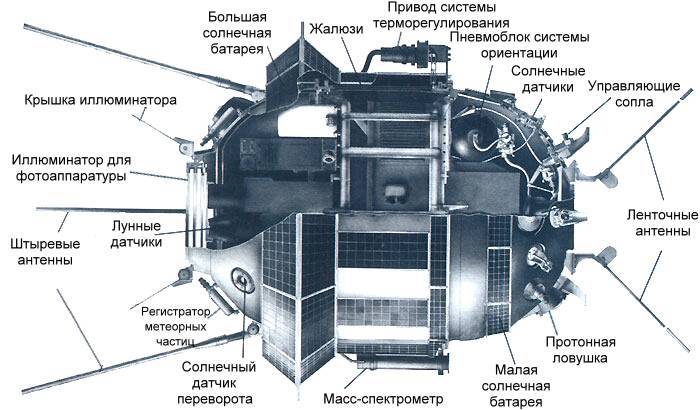
"Luna-3" with the orientation system "Seagull". Graphics Astronaut.ru
Autonomous control
Since 1957, the development of a promising manned spacecraft, subsequently called the Vostok, has been underway. He received automatic and manual control systems that duplicated each other. All means were distinguished by a certain simplicity and corresponded to the tasks set. So, the equipment made it possible to perform orientation in orbit and carry out descent. Other functions were virtually absent. For orientation in space, the ship had a set of low-power engines controlled by automation or an astronaut.
Horizontal alignment was carried out using infrared sensors. Along the axis of the orbit, the ship was guided by the Sun (automatically) or by the Earth, using the Vzor device (manually). Independently or on command, automation could perform a descent from orbit using a braking propulsion system. The cosmonaut was asked to perform these tasks with the help of the Globus navigation device, which calculated the approximate landing area.
In May 1960, the first launch of an experimental Vostok in an unmanned configuration took place. The device under the designation "Sputnik-4" could not return to Earth due to a failure in the orientation system. Then several more launches took place, incl. with a payload in the form of scientific equipment, animals and dummies. For example, on August 19, 1960, the famous Belka and Strelka went into space. For obvious reasons, these flights used only automatic and remote control.

The instrument panel of the manned spacecraft "Vostok". Photo by Wikimedia Commons
Finally, on April 12, 1961, the first flight of the Vostok took place in a manned configuration. Under the control of the world's first pilot-cosmonaut Yu.A. Gagarin's ship made one orbit and successfully returned to Earth. Over the next two years, five more launches of Vostok spacecraft with astronauts and a large number of unmanned tests took place. All these activities confirmed the operability of the new control systems.
On-board computer
Already during the development of the Luna or Vostok spacecraft, Soviet specialists were working on further ways to develop control systems for spacecraft and AMS. So, in the late fifties, research began on the topic of sending spacecraft to Mars. At first, the work was carried out within the framework of the 1M program.
The use of radio command control in such a program was virtually excluded. Separate automated tools, as in previous projects, also had their drawbacks. In this regard, it was decided to create the so-called. a calculating unit based on an onboard central computer, to which all other AMS systems would be connected. The task of creating SRB was successfully solved, moreover, with the introduction of new solutions and a modern component base. In fact, it was about a single on-board computer that performs all tasks during the flight.
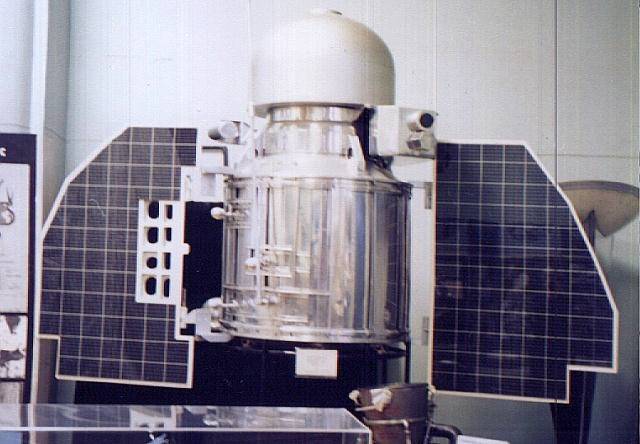
AMS "Mars-1960" with a full-fledged onboard computer. Photo by Wikimedia Commons
As part of the 1M program, two Mars-1960 stations were built. They had to automatically fly near Mars, collect scientific data and transmit them to Earth. The launch of both AMS took place in October 1960, and both launches ended in accidents - the stations burned out in the atmosphere. It was not possible to test the SRB in flight.
However, the developments on the idea of SRB have not disappeared. Soon the development of the "heavy interplanetary ship" TMK began, which was also decided to be equipped with a single computer complex. This project was not crowned with success, but its developers managed to move forward again in the creation of computers for space.
Finally, as part of the TMK work, the concept of a single on-board computer responsible for all operations and helping the crew was finally formed and worked out. Soon this concept was used in the creation of the Soyuz manned spacecraft, the Salyut orbital stations, and a number of other projects.
One of the blocks of the early onboard computer for the Soyuz spacecraft. Photo habr.com
evolutionary processes
In the fifties and sixties, the development of the rocket and space sphere proceeded at a high pace. Key events that determined the further development of cosmonautics occurred with enviable regularity, and they were often separated by a few months. At the same time, a large number of enterprises and specialists from different areas were employed in the industry, which contributed to the rapid solution of problems.
These trends are well illustrated by the evolution of control systems for spacecraft and ships. So, in 1957, Sputnik-1 went into orbit without any means of control, and already in 1960, an AMS with a multifunctional on-board computer was manufactured and launched. At the same time, the main ideas and concepts were formed, which are still used in astronautics - but already at the modern technical level.
Information