MAI is developing a new control system for autonomous RTK
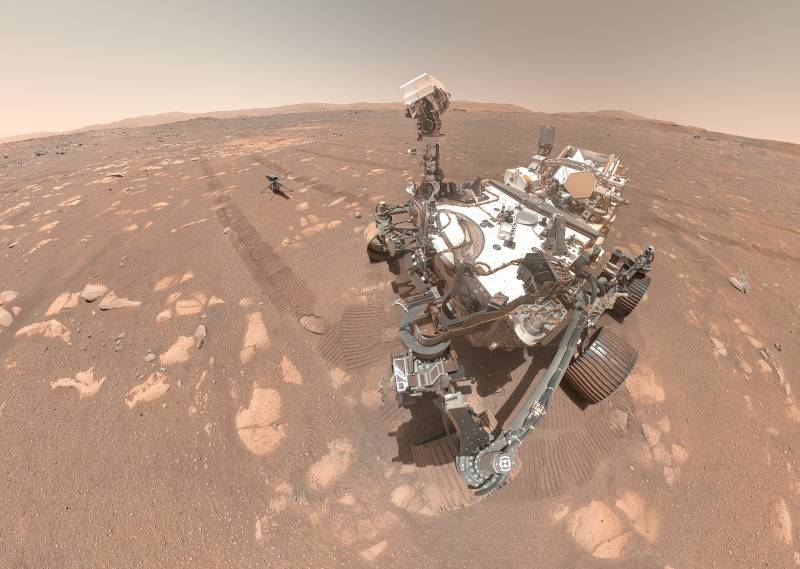
The Perseverance rover is an example of the application of SLAM technology. Photo by NASA
To create promising robotic systems of various kinds, a wide range of various technologies is required. Autonomous control systems, technical vision aids, etc. are of particular importance in this context. Systems and technologies of this kind are being developed by a number of domestic organizations, and new participants regularly join such work. So, recently it became known about another similar project being developed by students of the Moscow Aviation Institute.
Perspective development
At the end of December, the MAI press service announced the development of a new interesting project. Aleksey Koltovsky, a 3rd year student at Aerospace Institute No. 6 of the MAI, creates a software package with an autonomous control function robot. The developments on this project in the future can be used to create various robotic systems, incl. space destination.
The reason for the emergence of the project is the need to get rid of the characteristic problems and limitations that space systems face. So, the radio signal from Earth to Mars takes about 15 minutes, and the same amount of time is needed to receive a response. Accordingly, remote control of a planetary rover or other equipment becomes practically impossible. In addition, the assessment of the situation by the operator is difficult due to the poor quality of the sent photos or video signal.
The solution to these problems, as conceived by A. Koltovsky, should be a software package with the function of autonomous navigation and driving. Modern hardware and software allow the robot to create a three-dimensional representation of the environment, as well as independently make decisions and make a route.
As reported, at present, a student-developer is creating a software package with the necessary functions and capabilities. The next phase of the project is already being planned. In the spring, the author and his colleagues are going to conduct the first tests. They will use a self-propelled six-wheeled platform, which will be equipped with controls based on new algorithms.

Experimental RTK "Marker", designed to test new technologies. Photo FPI
A. Koltovsky notes that if successful, new software tools and technologies from his project can be used to create various RTKs for solving a wide range of tasks. The developer himself is primarily focused on the space sector - it is research vehicles that will be able to fully realize the potential of new technologies.
Autonomy and Simplification
The publication of the MAI press service describes the general principles of the developed system, its capabilities and advantages. In general, we are talking about the use of already known solutions, but with their adaptation and refinement for specific practical tasks and scope. Thus, it is proposed to reduce the range of devices used and get by with a minimum number of them.
In order to simplify the design and software, it is proposed to use only optical means for visual study of the terrain / route. The use of accelerometers or other devices is not provided. A set of cameras is connected to a computer that performs the necessary calculations and issues commands to the actuators.
The complex as a whole should work on the technology of "simultaneous localization and mapping" (Simultaneous Localization And Mapping - SLAM). The computer will receive the video signal from the cameras and, processing it, draw up a map of the area with all its features, incl. with obstacles. Based on this data, the automation will build a route and decide how to overcome each obstacle.
The software for the advanced complex is written in Python. In addition, the author uses machine learning and machine vision libraries. The main task at the moment is to optimize the algorithms and data sets used to reduce the required computing power and at the same time increase performance.
A. Koltovsky notes that the existing OpenCV library in its original form, without optimization, is capable of processing a video signal at a rate of 0,82 frames per second. Optimization of algorithms allows you to increase performance up to 8-10 frames per second.

"Marker" on a wheeled chassis. Photo FPI
In general, SLAM technology has significant prospects and has already demonstrated its capabilities in practice. So, the Perseverance rover of the American agency NASA determines obstacles, incl. through optical means. Photo and video processing with the creation of three-dimensional maps of the area made it possible to increase the permissible speed from 20 m/h to 120 m/h - six times.
It is noted that such a project is unique for Russian science. The tasks of creating software systems for autonomous control systems based on SLAM and their adaptation to relatively low-power computing platforms in our country have not yet been solved. Thus, a student project has at least historical value.
Against the backdrop of the industry
In recent years, a large number of various ground-based RTKs with different functions and capabilities have been created in our country. Some of these systems have even reached practical operation in various structures and departments. In particular, robots of several types for the army have become widely known. At the same time, the development of the industry and the development of new projects do not stop. In addition, various organizations and enthusiasts are creating a scientific and technological base for the following projects.
One of the main tasks of the industry at the moment is the creation of autonomous control systems capable of driving in different conditions, moving along a given route or independently overcoming obstacles. To solve such problems, various so-called devices are used. technical vision and on-board computers with special software.
The standard set of sensors for self-driving ground RTK includes cameras and lidars, as well as, in some cases, ultrasonic or radar sensors. All these devices collect data that the computer combines into a three-dimensional map of the area, suitable for orientation. In addition, data from satellite or inertial navigation aids are added to the terrain map.
This method of determining the location and working out the route has long shown and confirmed its potential and capabilities. However, it is distinguished by a certain complexity and high cost from a hardware point of view - it uses rather complex and expensive sensors. In addition, the instrumental part of the finished RTK, as a result, differs in considerable dimensions and weight.

Heavy engineering RTK "Prohod-1" - during operation, part of the tasks is solved by automation. Photo VNII "Signal"
A new project from the MAI proposes to optimize the processes of mapping and subsequent navigation on the ground. Its main idea is to abandon all sensors with the exception of video cameras while improving the software used. In theory, this approach is quite beneficial technically and economically, although the new technology needs to be developed and tested.
The project of an MAI student or similar developments by other authors are of interest in the context of the further development of RTK for various tasks. Increasing the autonomy of the robot while driving allows you to reduce the load on the operator and ensure the successful passage of the route.
In addition, it becomes possible to create completely autonomous systems for working in difficult conditions, incl. when radio control cannot be used. The developer of the new system indicates that this will be useful in space exploration. However, there is work for autonomous machines on Earth.
Reason for optimism
The project of the control system from the MAI student is still at the development stage, but tests are already expected using an experimental ground platform. A practical test of new technologies will take place in the spring, and then it will become clear how successful the new project is. Then it will be possible to evaluate it and determine the real value for the industry.
Whether the experienced RTK and its control system will cope with the upcoming checks is unknown. However, even now this project shows that now - thanks to progress and the availability of the necessary developments - not only large organizations, but also enthusiasts or students can create promising technologies. And it is quite possible that such projects in the future will have a significant impact on the development of the industry as a whole.
Information