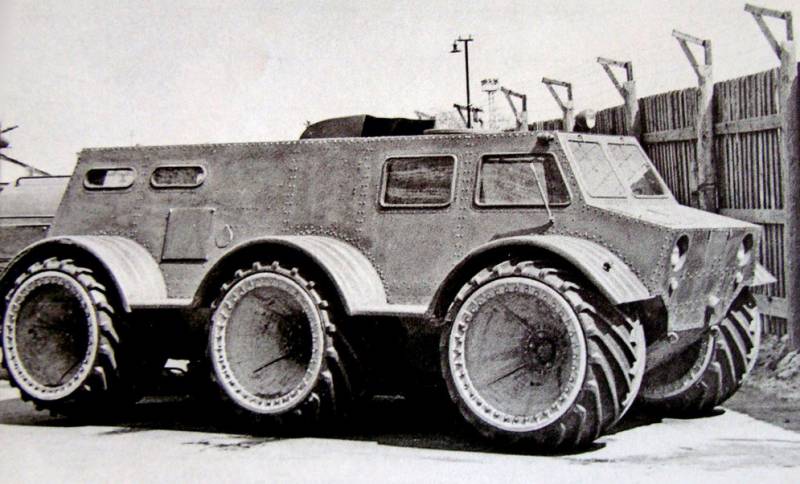
Experienced all-terrain vehicle ZIL-136
Since the mid-fifties, the Special Design Bureau of the Moscow Plant them. Likhachev was engaged in the subject of ultra-high cars. Various new ideas and solutions were studied and studied, for which special experimental samples with different characteristics were created and tested. The gradual study of the subject and development of original ideas over time led to the emergence of an experienced all-terrain vehicle / snow and swamp-going vehicle ZIL-136.
SKB ZIL (before 1956, the SKB ZIS), headed by V.A. Grachev began the study of the subject of all-terrain vehicles with the creation of several pilot projects under the common name ZIS-E134. Compared to other members of such a family, the so-called. mock-up sample number XXUMX. When creating it, it was proposed to use a chassis with a rigid suspension of three pairs of large diameter wheels. It was assumed that this design will allow the machine to show increased characteristics of cross-country ability on rough terrain and soft soils. The sample transmission was built by the so-called. the onboard circuit that released certain volumes inside the hull.

Experienced all-terrain vehicle ZIL-136. Photo Denisovets.ru
According to reports, even before the construction of the experienced “Layout No. XXNX”, the army showed interest in the proposed scheme of the all-terrain vehicle. As a result, no later than spring 3 of the year, SKB VMS received a task to develop a new experienced all-terrain vehicle with a three-axle chassis with a rigid suspension. Unlike a number of other experimental samples of that time, a new ultra-high-pass machine was to be created in the framework of a direct agreement with the Autotractor Directorate of the Ministry of Defense.
The design of the new all-terrain vehicle was completed by the middle of the 1956 of the year, and in early July an experimental machine was taken out of the assembly shop. Just a few days before the plant received the name of I.A. Likhachev, which affected the designation of the new project. The prototype of the new model was given the name ZIL-136. It is curious that it is in the context of the ZIL-136 project that the new term “snow and swamp vehicle” begins to figure for the first time.
It should be noted that the name ZIL-136 can lead to a certain confusion. In the 1958 year - after the completion of the main work on the all-terrain vehicle for the army - Plant them. Likhachev together with NAMI began the development of a promising diesel engine. The latter, for some reason, received the factory designation ZIL-136. At the same time, all-terrain vehicle and diesel projects were in no way connected with each other. A few years later the truck ZIL-136I went into the series. It was a modification of the serial ZIL-130, distinguished by the use of a British-made diesel engine. Naturally, this car had nothing to do with an experienced all-terrain vehicle.
The ZIL-136 project envisaged the construction of a three-axle all-terrain vehicle capable of traveling both by land and by water. In his design should use a number of proven and proven ideas. At the same time, it was proposed to develop and apply a transmission of a simplified design, which has all the necessary functions, but with a lower weight.
The new all-terrain vehicle received the original bearing body of aluminum and steel sheets. Details of a simplified form were mounted on a light frame and were connected to each other using rivets. The upper part of the hull, including the sides and the roof, was made of aluminum. The bottom one, which took all the loads, was made of steel. Due to the specific features of riveted joints, all seams were additionally smeared with waterproof paste-sealant.
The frontal part of the body differed in its characteristic shape formed by several large polygonal details. A large frontal sheet, which had a niche for headlights, was installed with a slope forward. Below it was the front section of the bottom. Above the large frontal unit was a smaller rectangular part, behind which was a frontal sheet with two openings for windshields. The hull received the boards of a relatively complex shape. Their lower part, designed to install the elements of the chassis, was made vertical. The aluminum upper part of the sides, in turn, was installed with a slope inward. Above the hull was covered with a horizontal roof. Aft leaf set downward, with a blockage ahead.

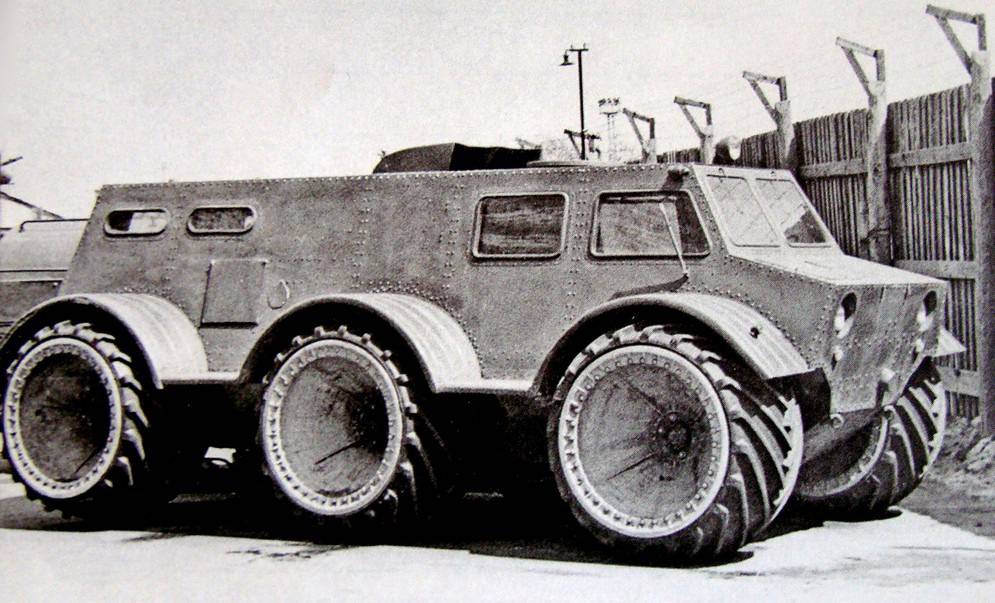
The car at the site. Photo Denisovets.ru
To obtain optimal balancing that does not interfere with the movement in water, a specific layout of the internal volumes of the hull was used. The front of the car could accommodate the cockpit with several seats. Under it was a continuous front axle with part of the transmission parts. Other units responsible for driving the drive wheels, located above the bottom of the hull. The engine and gearbox occupied the middle and rear of the case.
The all-terrain vehicle ZIL-136 was a purely experimental machine, and therefore did not need special development of the main units. So, it was equipped with a gasoline engine ZIS-110, borrowed from the car of the same name. This 6 l engine developed power up to 140 hp. In front of the engine was a three-speed manual gearbox, also taken from the serial ZIS-110. The engine exhaust was brought out through a curved pipe that went through a hole in the left side. Above, under the glazing, a silencer was fixed.
The task of power distribution over all drive wheels was most often solved with the help of a set of transfer cases, differentials, etc. In the project ZIL-136 decided to use the so-called. onboard circuit with power distribution to two streams, each of which was directed to the wheels of its own side. In this case, a simplified version of such a scheme was proposed, which can do without unnecessarily complex gearboxes, etc. devices.
In front of the machine, a continuous bridge was installed, borrowed from one of the existing serial equipment models. His mezhbortovoy differential responsible for the transmission of torque to the front wheels. The bridge was supplemented with a pair of bevel gears connected with cardan shafts. The latter were associated with onboard bevel gears of the second and third axis. There was a separate shaft to drive the jet propulsion. This transmission design was relatively simple, but allowed to get all the desired features.
The experimental all-terrain vehicle was equipped with a six-wheeled undercarriage with a rigid wheel suspension. The task of depreciation was assigned to low-pressure tires, able to compensate for all surface irregularities and the resulting shocks. The axles were set at the same distance from each other. All wheels are connected to the brake system. To obtain sufficient maneuverability on all surfaces, two axes, front and rear, were made controlled. The control system included a hydraulic power steering and rigid mechanical connections between the wheels of different axles. A significant part of the steering system units was borrowed from the ZIS-110.
During the test, the authors of the project ZIL-136 planned to check the performance of the chassis when using tires of different types. Wheels could be equipped with tires of different sizes and shapes. In particular, the use of arched tires was envisaged. In all cases, the wheels were connected to a centralized pressure control system. The compressed air supply tubes were located inside the bridges and did not protrude beyond the chassis. On top of the wheels were covered with large plate wings. In the intervals between the latter, there were rectangular steps for landing in a snow and swamp-going vehicle.
ZIL-136 with arched tires. Trucksplanet.com Photos
In the back of the hull, a water jet was placed, which made the experimental machine a full-fledged amphibian. Apparently, this device was borrowed from one of the serial samples, but it is not known which machine became the source of parts.
ZIL-136 had a fairly large cabin, allowing to accommodate several people in it, including the driver. The control post was located in front of the hull, at the left side. The driver could watch the road through two large windshields and a pair of side windows. Two more windows were on the sides, right behind the driver’s seat. In the stern of the board it was proposed to install a pair of smaller windows. According to some reports, the stern sheet of the hull also had an opening for glazing.
To get into the all-terrain vehicle was offered with the help of the door on the left side, which was immediately behind the driver's seat. In order to avoid water getting inside the car when swimming, the lower cut of the side opening was high enough. The rectangular area between the wings of the first two wheels could be used as a step. A hatch in the roof could be used for observation and emergency escape of the car.
The result of the ZIL-136 project was an ultra-high-performance car with a length of 6,2 m and a width of about 2,6-2,7 m (depending on the type of wheels installed) and a height of no more than 2,4 m. Clearance - 360 mm. The experimental machine curb weight was 5250 kg. Due to the special nature of the project, maximum speed and power reserve indicators were not of particular interest. The focus was on the characteristics of terrain.
The assembly of the only experienced all-terrain vehicle / snow and swamp vehicle ZIL-136 was completed in early July 1956. It is curious that around the same time the plant them. Likhachev assembled an experimental three-axis prototype model №3 of the project ZIS-Э134. However, as far as is known, the work on the two projects went in parallel and did not overlap.
Apparently, the tests of the prototype started in the summer of 1956, however, for obvious reasons, they could not reach the most difficult stages for several months. The first run-in on the highway helped to identify some of the shortcomings of the existing design. It turned out that in the steering system there are quite large gaps. As a consequence, the all-terrain vehicle hardly holds the road and shows a tendency to descend from a given trajectory. Probably, soon these problems were eliminated, which allowed to continue the tests.
The dynamics of the car on a good road was satisfactory. The experimental snow and swamp-going vehicle accelerated to the required speeds and, not counting problems with control, behaved well on the track. Two pairs of steering wheels allowed to maneuver with a minimum turning radius at the level of 14 m.

All-terrain vehicle on the virgin snow. Photo Avtohistor.ru
However, the establishment of characteristics on good roads was not the goal of the project. Soon an experienced ZIL-136 went off-road. This test phase also gave the desired results and showed the real capabilities of the machine. At the end of autumn, snow fell in the Moscow region, which made it possible to start testing prototypes on difficult tracks.
In general, the all-terrain vehicle was well kept in the snow and moved at an acceptable speed, although it was not without problems. So, it turned out that a trip through loose snow is an extremely difficult task. The reasons for this were in the design of the transmission. The only complete bridge of the snow and swamp vehicle was not equipped with a lockable differential. For this reason, the car, having lost contact of the wheel of one side with the ground, could not redirect power to the other wheels. On a more dense snow cover, similar problems were absent.
Large wheels with adjustable low-pressure tires gave the all-terrain vehicle a high throughput. It moved freely over rough terrain and off-road, including some snowy fields. During the tests, the ZIL-136 was able to overcome quite difficult obstacles, such as snow plans up to 2 m.
The experienced ZIL-136 all-terrain vehicle was tested in parallel with several other ultra-high-performance experimental machines and helped to complement the existing picture. In practice, he confirmed the potential of a three-axle undercarriage with a rigid suspension of wheels equipped with low-pressure tires. In addition, this machine has demonstrated the fundamental possibility of using the onboard transmission system, however, it was found that the existing design is not without flaws and therefore needs certain modifications. Finally, it was shown the possibility of using all such ideas and solutions when creating a full-fledged vehicle for the armed forces or the national economy.
All work on the project ZIL-136 all-terrain vehicle was completed no later than the middle of the year 1957. The experimental sample was tested and helped to collect the necessary data, after which it turned out to be unnecessary. At the end of the test, a unique prototype was sent to the parking lot. Later, apparently, the only built ZIL-136 was disassembled as unnecessary. Metal could go to the smelter, and the designation of the project soon passed to a promising diesel engine.
The only built experienced all-terrain vehicle ZIL-136 was disassembled shortly after completion of the tests. Nevertheless, the experience and conclusions obtained during the development and testing of this machine did not disappear and in the very near future they found application in new projects. At that time, SKB ZIL worked at once on several samples of promising technology with outstanding throughput indicators, and some of them "inherited" certain features of the experimental ZIL-136.
Based on:
http://denisovets.ru/
http://arsenal-info.ru/
https://trucksplanet.com/
Kochnev E.D. Secret cars of the Soviet Army. - M .: Yauza, Eksmo, 2011.
SKB ZIL (before 1956, the SKB ZIS), headed by V.A. Grachev began the study of the subject of all-terrain vehicles with the creation of several pilot projects under the common name ZIS-E134. Compared to other members of such a family, the so-called. mock-up sample number XXUMX. When creating it, it was proposed to use a chassis with a rigid suspension of three pairs of large diameter wheels. It was assumed that this design will allow the machine to show increased characteristics of cross-country ability on rough terrain and soft soils. The sample transmission was built by the so-called. the onboard circuit that released certain volumes inside the hull.

Experienced all-terrain vehicle ZIL-136. Photo Denisovets.ru
According to reports, even before the construction of the experienced “Layout No. XXNX”, the army showed interest in the proposed scheme of the all-terrain vehicle. As a result, no later than spring 3 of the year, SKB VMS received a task to develop a new experienced all-terrain vehicle with a three-axle chassis with a rigid suspension. Unlike a number of other experimental samples of that time, a new ultra-high-pass machine was to be created in the framework of a direct agreement with the Autotractor Directorate of the Ministry of Defense.
The design of the new all-terrain vehicle was completed by the middle of the 1956 of the year, and in early July an experimental machine was taken out of the assembly shop. Just a few days before the plant received the name of I.A. Likhachev, which affected the designation of the new project. The prototype of the new model was given the name ZIL-136. It is curious that it is in the context of the ZIL-136 project that the new term “snow and swamp vehicle” begins to figure for the first time.
It should be noted that the name ZIL-136 can lead to a certain confusion. In the 1958 year - after the completion of the main work on the all-terrain vehicle for the army - Plant them. Likhachev together with NAMI began the development of a promising diesel engine. The latter, for some reason, received the factory designation ZIL-136. At the same time, all-terrain vehicle and diesel projects were in no way connected with each other. A few years later the truck ZIL-136I went into the series. It was a modification of the serial ZIL-130, distinguished by the use of a British-made diesel engine. Naturally, this car had nothing to do with an experienced all-terrain vehicle.
The ZIL-136 project envisaged the construction of a three-axle all-terrain vehicle capable of traveling both by land and by water. In his design should use a number of proven and proven ideas. At the same time, it was proposed to develop and apply a transmission of a simplified design, which has all the necessary functions, but with a lower weight.
The new all-terrain vehicle received the original bearing body of aluminum and steel sheets. Details of a simplified form were mounted on a light frame and were connected to each other using rivets. The upper part of the hull, including the sides and the roof, was made of aluminum. The bottom one, which took all the loads, was made of steel. Due to the specific features of riveted joints, all seams were additionally smeared with waterproof paste-sealant.
The frontal part of the body differed in its characteristic shape formed by several large polygonal details. A large frontal sheet, which had a niche for headlights, was installed with a slope forward. Below it was the front section of the bottom. Above the large frontal unit was a smaller rectangular part, behind which was a frontal sheet with two openings for windshields. The hull received the boards of a relatively complex shape. Their lower part, designed to install the elements of the chassis, was made vertical. The aluminum upper part of the sides, in turn, was installed with a slope inward. Above the hull was covered with a horizontal roof. Aft leaf set downward, with a blockage ahead.

The car at the site. Photo Denisovets.ru
To obtain optimal balancing that does not interfere with the movement in water, a specific layout of the internal volumes of the hull was used. The front of the car could accommodate the cockpit with several seats. Under it was a continuous front axle with part of the transmission parts. Other units responsible for driving the drive wheels, located above the bottom of the hull. The engine and gearbox occupied the middle and rear of the case.
The all-terrain vehicle ZIL-136 was a purely experimental machine, and therefore did not need special development of the main units. So, it was equipped with a gasoline engine ZIS-110, borrowed from the car of the same name. This 6 l engine developed power up to 140 hp. In front of the engine was a three-speed manual gearbox, also taken from the serial ZIS-110. The engine exhaust was brought out through a curved pipe that went through a hole in the left side. Above, under the glazing, a silencer was fixed.
The task of power distribution over all drive wheels was most often solved with the help of a set of transfer cases, differentials, etc. In the project ZIL-136 decided to use the so-called. onboard circuit with power distribution to two streams, each of which was directed to the wheels of its own side. In this case, a simplified version of such a scheme was proposed, which can do without unnecessarily complex gearboxes, etc. devices.
In front of the machine, a continuous bridge was installed, borrowed from one of the existing serial equipment models. His mezhbortovoy differential responsible for the transmission of torque to the front wheels. The bridge was supplemented with a pair of bevel gears connected with cardan shafts. The latter were associated with onboard bevel gears of the second and third axis. There was a separate shaft to drive the jet propulsion. This transmission design was relatively simple, but allowed to get all the desired features.
The experimental all-terrain vehicle was equipped with a six-wheeled undercarriage with a rigid wheel suspension. The task of depreciation was assigned to low-pressure tires, able to compensate for all surface irregularities and the resulting shocks. The axles were set at the same distance from each other. All wheels are connected to the brake system. To obtain sufficient maneuverability on all surfaces, two axes, front and rear, were made controlled. The control system included a hydraulic power steering and rigid mechanical connections between the wheels of different axles. A significant part of the steering system units was borrowed from the ZIS-110.
During the test, the authors of the project ZIL-136 planned to check the performance of the chassis when using tires of different types. Wheels could be equipped with tires of different sizes and shapes. In particular, the use of arched tires was envisaged. In all cases, the wheels were connected to a centralized pressure control system. The compressed air supply tubes were located inside the bridges and did not protrude beyond the chassis. On top of the wheels were covered with large plate wings. In the intervals between the latter, there were rectangular steps for landing in a snow and swamp-going vehicle.
ZIL-136 with arched tires. Trucksplanet.com Photos
In the back of the hull, a water jet was placed, which made the experimental machine a full-fledged amphibian. Apparently, this device was borrowed from one of the serial samples, but it is not known which machine became the source of parts.
ZIL-136 had a fairly large cabin, allowing to accommodate several people in it, including the driver. The control post was located in front of the hull, at the left side. The driver could watch the road through two large windshields and a pair of side windows. Two more windows were on the sides, right behind the driver’s seat. In the stern of the board it was proposed to install a pair of smaller windows. According to some reports, the stern sheet of the hull also had an opening for glazing.
To get into the all-terrain vehicle was offered with the help of the door on the left side, which was immediately behind the driver's seat. In order to avoid water getting inside the car when swimming, the lower cut of the side opening was high enough. The rectangular area between the wings of the first two wheels could be used as a step. A hatch in the roof could be used for observation and emergency escape of the car.
The result of the ZIL-136 project was an ultra-high-performance car with a length of 6,2 m and a width of about 2,6-2,7 m (depending on the type of wheels installed) and a height of no more than 2,4 m. Clearance - 360 mm. The experimental machine curb weight was 5250 kg. Due to the special nature of the project, maximum speed and power reserve indicators were not of particular interest. The focus was on the characteristics of terrain.
The assembly of the only experienced all-terrain vehicle / snow and swamp vehicle ZIL-136 was completed in early July 1956. It is curious that around the same time the plant them. Likhachev assembled an experimental three-axis prototype model №3 of the project ZIS-Э134. However, as far as is known, the work on the two projects went in parallel and did not overlap.
Apparently, the tests of the prototype started in the summer of 1956, however, for obvious reasons, they could not reach the most difficult stages for several months. The first run-in on the highway helped to identify some of the shortcomings of the existing design. It turned out that in the steering system there are quite large gaps. As a consequence, the all-terrain vehicle hardly holds the road and shows a tendency to descend from a given trajectory. Probably, soon these problems were eliminated, which allowed to continue the tests.
The dynamics of the car on a good road was satisfactory. The experimental snow and swamp-going vehicle accelerated to the required speeds and, not counting problems with control, behaved well on the track. Two pairs of steering wheels allowed to maneuver with a minimum turning radius at the level of 14 m.
All-terrain vehicle on the virgin snow. Photo Avtohistor.ru
However, the establishment of characteristics on good roads was not the goal of the project. Soon an experienced ZIL-136 went off-road. This test phase also gave the desired results and showed the real capabilities of the machine. At the end of autumn, snow fell in the Moscow region, which made it possible to start testing prototypes on difficult tracks.
In general, the all-terrain vehicle was well kept in the snow and moved at an acceptable speed, although it was not without problems. So, it turned out that a trip through loose snow is an extremely difficult task. The reasons for this were in the design of the transmission. The only complete bridge of the snow and swamp vehicle was not equipped with a lockable differential. For this reason, the car, having lost contact of the wheel of one side with the ground, could not redirect power to the other wheels. On a more dense snow cover, similar problems were absent.
Large wheels with adjustable low-pressure tires gave the all-terrain vehicle a high throughput. It moved freely over rough terrain and off-road, including some snowy fields. During the tests, the ZIL-136 was able to overcome quite difficult obstacles, such as snow plans up to 2 m.
The experienced ZIL-136 all-terrain vehicle was tested in parallel with several other ultra-high-performance experimental machines and helped to complement the existing picture. In practice, he confirmed the potential of a three-axle undercarriage with a rigid suspension of wheels equipped with low-pressure tires. In addition, this machine has demonstrated the fundamental possibility of using the onboard transmission system, however, it was found that the existing design is not without flaws and therefore needs certain modifications. Finally, it was shown the possibility of using all such ideas and solutions when creating a full-fledged vehicle for the armed forces or the national economy.
All work on the project ZIL-136 all-terrain vehicle was completed no later than the middle of the year 1957. The experimental sample was tested and helped to collect the necessary data, after which it turned out to be unnecessary. At the end of the test, a unique prototype was sent to the parking lot. Later, apparently, the only built ZIL-136 was disassembled as unnecessary. Metal could go to the smelter, and the designation of the project soon passed to a promising diesel engine.
The only built experienced all-terrain vehicle ZIL-136 was disassembled shortly after completion of the tests. Nevertheless, the experience and conclusions obtained during the development and testing of this machine did not disappear and in the very near future they found application in new projects. At that time, SKB ZIL worked at once on several samples of promising technology with outstanding throughput indicators, and some of them "inherited" certain features of the experimental ZIL-136.
Based on:
http://denisovets.ru/
http://arsenal-info.ru/
https://trucksplanet.com/
Kochnev E.D. Secret cars of the Soviet Army. - M .: Yauza, Eksmo, 2011.
Information