Unusual tanks of Russia and the USSR. Hydrofoil tanks
Overcoming water obstacles has always been a difficult task for a heavy armored vehicle, given that in combat bridges and crossings are usually destroyed by the retreating enemy. AT stories tank building there are many examples of the creation of vehicles that can cross the opposite bank, moving both on water and on the bottom of the river. However, the complexity and time-consuming preparation of ordinary, medium or heavy tank to underwater passage or poor booking and the impossibility of installing powerful weapons on light amphibious tanks made Soviet engineers and designers look for other ways. It required a floating tank with bulletproof armor and armament of at least a medium tank, capable of participating in quick landing operations to capture a bridgehead on the coast and using its weapons to destroy coastal fortifications and suppress enemy firing points. Since it seemed almost impossible to build such a machine that met such high requirements, the tank builders proposed another solution to this problem. One of these options was to improve the machine without making significant changes to the design, namely equipping a conventional medium production tank with special mounted craft. Which, if necessary, allowed the machine to transform into a river or sea vessel and at the same time combine the best qualities of a medium tank and high-speed water transport. One of these projects was implemented in the USSR in the middle of the last century and had the designation "project 80".

Work in this direction began in the Soviet Union in the 1951 year with the development of special tank-attached pontoons, which allowed the car to stay afloat and move independently on water. The first project involved the installation of this equipment on the production tank T-54 (received the designation PST-54). After construction and running trials, attachments were put into service in the 1957 year. This was followed by a project to create a craft for the T-55 tank (designation PST-55), which was also successfully completed.


Later, in the 1959 year, it was decided to unify all the samples, after which the new equipment was given the designation PST-U, under which it was adopted by the Soviet Army in the 1960 year. PST-U mass was about 10 tons, movement through the water was carried out by transferring the force from the leading tank wheels to the two propellers. The maximum speed of movement by water was 12 km per hour, over land (with the installed PST-U) no more than 20 km per hour. However, too much weight and complexity of mounting the pontoons on the tank required improvements to the PS, so the work did not stop, and already in 1962, tests of the new PS are being conducted. The next sample was lighter on 4,5 tons, which allowed us to increase the maximum speed of movement by land to 25 km per hour, by water to 14 km per hour and significantly reduce the load on the undercarriage. Installing additional fuel tanks allowed to increase the cruising range to 110 km. Having received the designation PST-63, the watercraft with minor modifications was put into service in the 1965 year. Later PST-63 was improved to PST-64 and PST-64 M.
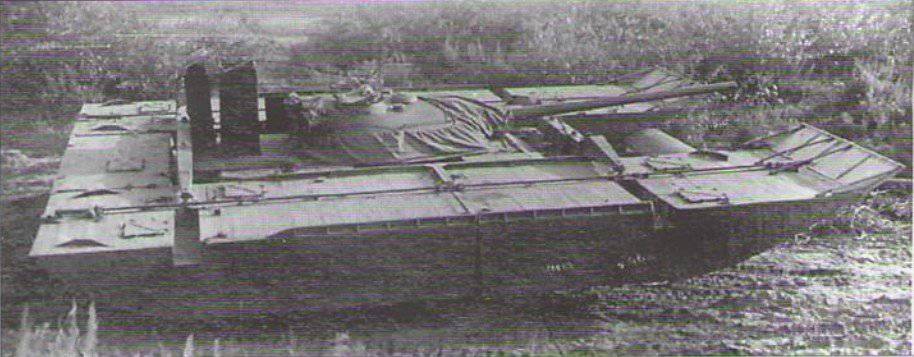
 The “80 project” meant equipping a medium tank with a watercraft consisting of two high-speed hydrofoil boats and was developed at Volgobaltsudoproekt design bureau, headed at that time by Mikhail Shchukin. At the beginning of 1966, a model of the future watercraft was built on the scale of 1: 2, on which various design solutions were worked out, then in 1967, the first prototype was made, which was immediately sent to sea trials that took place in the Black Sea near Sevastopol. During the tests, the maximum speed reached, which was 58 km per hour, was higher than the calculated speed, which was equal to 50 km per hour. However, further tests failed due to poor body strength. The screed, which does not allow discrepancies on the course of the carriers carrying the armored vehicle, has burst, as a result of which the boats dispersed and the tank sank. Fortunately, there were no casualties, soon the car was raised, and a special commission was set up to establish the causes of the accident. After conducting a number of different studies, the commission members concluded that the cause of the screed rupture was a small cut in its middle part. It was made intentionally or through negligence - it remains unknown. Nevertheless, in a short time the deficiencies were eliminated, and the new watercraft “project 80” was made in a small batch in the number of 13 copies. Part was sent to the Baltic Military District, part to the city of Sevastopol. It is worth noting that the movement on the water in the submerged position was possible with waves of no more than 5 points, movement on hydrofoils — with waves of no more than 3 points.
The “80 project” meant equipping a medium tank with a watercraft consisting of two high-speed hydrofoil boats and was developed at Volgobaltsudoproekt design bureau, headed at that time by Mikhail Shchukin. At the beginning of 1966, a model of the future watercraft was built on the scale of 1: 2, on which various design solutions were worked out, then in 1967, the first prototype was made, which was immediately sent to sea trials that took place in the Black Sea near Sevastopol. During the tests, the maximum speed reached, which was 58 km per hour, was higher than the calculated speed, which was equal to 50 km per hour. However, further tests failed due to poor body strength. The screed, which does not allow discrepancies on the course of the carriers carrying the armored vehicle, has burst, as a result of which the boats dispersed and the tank sank. Fortunately, there were no casualties, soon the car was raised, and a special commission was set up to establish the causes of the accident. After conducting a number of different studies, the commission members concluded that the cause of the screed rupture was a small cut in its middle part. It was made intentionally or through negligence - it remains unknown. Nevertheless, in a short time the deficiencies were eliminated, and the new watercraft “project 80” was made in a small batch in the number of 13 copies. Part was sent to the Baltic Military District, part to the city of Sevastopol. It is worth noting that the movement on the water in the submerged position was possible with waves of no more than 5 points, movement on hydrofoils — with waves of no more than 3 points.
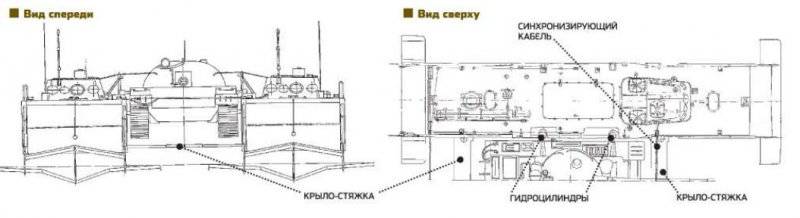
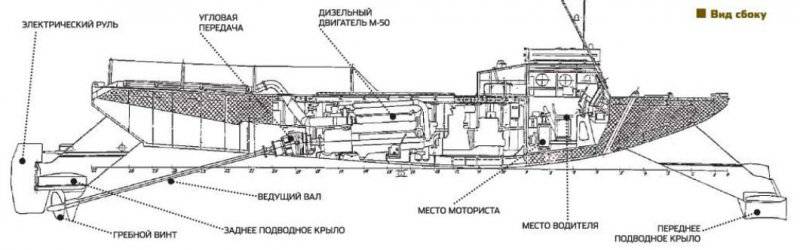
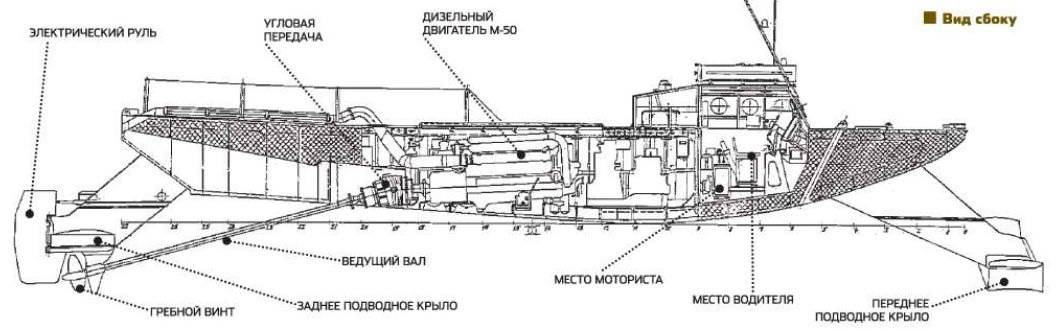
The boats included in the pair of the forearm “80 project” were made of high-strength aluminum alloy, equipped with the M-50 diesel engine with the power of 1200 hp. and fastened to the sides of the tank with specially designed eyes for its construction. The hydraulic cylinders installed on the boats were intended for raising them above the ground while traveling by land and lowering while traveling by water. The full installation of the craft on the tank took about an hour, and the “dropping” took place within 3 minutes. The underwater wings also had two positions: during transportation they rose up, when moving through the water they descended under the bottom of the carrying boats. The rear underwater wings were equipped with propellers and a steering mechanism, which made it possible to change the depth of the lowering of the propeller. This allowed the tank to pass even in the shallowest places. The control of both boats when driving on water was carried out by one member of the crew and was synchronized. But in the 1971 year, due to the inexpediency and lack of prospects, the project was closed.

Work in this direction began in the Soviet Union in the 1951 year with the development of special tank-attached pontoons, which allowed the car to stay afloat and move independently on water. The first project involved the installation of this equipment on the production tank T-54 (received the designation PST-54). After construction and running trials, attachments were put into service in the 1957 year. This was followed by a project to create a craft for the T-55 tank (designation PST-55), which was also successfully completed.

Later, in the 1959 year, it was decided to unify all the samples, after which the new equipment was given the designation PST-U, under which it was adopted by the Soviet Army in the 1960 year. PST-U mass was about 10 tons, movement through the water was carried out by transferring the force from the leading tank wheels to the two propellers. The maximum speed of movement by water was 12 km per hour, over land (with the installed PST-U) no more than 20 km per hour. However, too much weight and complexity of mounting the pontoons on the tank required improvements to the PS, so the work did not stop, and already in 1962, tests of the new PS are being conducted. The next sample was lighter on 4,5 tons, which allowed us to increase the maximum speed of movement by land to 25 km per hour, by water to 14 km per hour and significantly reduce the load on the undercarriage. Installing additional fuel tanks allowed to increase the cruising range to 110 km. Having received the designation PST-63, the watercraft with minor modifications was put into service in the 1965 year. Later PST-63 was improved to PST-64 and PST-64 M.

 The “80 project” meant equipping a medium tank with a watercraft consisting of two high-speed hydrofoil boats and was developed at Volgobaltsudoproekt design bureau, headed at that time by Mikhail Shchukin. At the beginning of 1966, a model of the future watercraft was built on the scale of 1: 2, on which various design solutions were worked out, then in 1967, the first prototype was made, which was immediately sent to sea trials that took place in the Black Sea near Sevastopol. During the tests, the maximum speed reached, which was 58 km per hour, was higher than the calculated speed, which was equal to 50 km per hour. However, further tests failed due to poor body strength. The screed, which does not allow discrepancies on the course of the carriers carrying the armored vehicle, has burst, as a result of which the boats dispersed and the tank sank. Fortunately, there were no casualties, soon the car was raised, and a special commission was set up to establish the causes of the accident. After conducting a number of different studies, the commission members concluded that the cause of the screed rupture was a small cut in its middle part. It was made intentionally or through negligence - it remains unknown. Nevertheless, in a short time the deficiencies were eliminated, and the new watercraft “project 80” was made in a small batch in the number of 13 copies. Part was sent to the Baltic Military District, part to the city of Sevastopol. It is worth noting that the movement on the water in the submerged position was possible with waves of no more than 5 points, movement on hydrofoils — with waves of no more than 3 points.
The “80 project” meant equipping a medium tank with a watercraft consisting of two high-speed hydrofoil boats and was developed at Volgobaltsudoproekt design bureau, headed at that time by Mikhail Shchukin. At the beginning of 1966, a model of the future watercraft was built on the scale of 1: 2, on which various design solutions were worked out, then in 1967, the first prototype was made, which was immediately sent to sea trials that took place in the Black Sea near Sevastopol. During the tests, the maximum speed reached, which was 58 km per hour, was higher than the calculated speed, which was equal to 50 km per hour. However, further tests failed due to poor body strength. The screed, which does not allow discrepancies on the course of the carriers carrying the armored vehicle, has burst, as a result of which the boats dispersed and the tank sank. Fortunately, there were no casualties, soon the car was raised, and a special commission was set up to establish the causes of the accident. After conducting a number of different studies, the commission members concluded that the cause of the screed rupture was a small cut in its middle part. It was made intentionally or through negligence - it remains unknown. Nevertheless, in a short time the deficiencies were eliminated, and the new watercraft “project 80” was made in a small batch in the number of 13 copies. Part was sent to the Baltic Military District, part to the city of Sevastopol. It is worth noting that the movement on the water in the submerged position was possible with waves of no more than 5 points, movement on hydrofoils — with waves of no more than 3 points. The boats included in the pair of the forearm “80 project” were made of high-strength aluminum alloy, equipped with the M-50 diesel engine with the power of 1200 hp. and fastened to the sides of the tank with specially designed eyes for its construction. The hydraulic cylinders installed on the boats were intended for raising them above the ground while traveling by land and lowering while traveling by water. The full installation of the craft on the tank took about an hour, and the “dropping” took place within 3 minutes. The underwater wings also had two positions: during transportation they rose up, when moving through the water they descended under the bottom of the carrying boats. The rear underwater wings were equipped with propellers and a steering mechanism, which made it possible to change the depth of the lowering of the propeller. This allowed the tank to pass even in the shallowest places. The control of both boats when driving on water was carried out by one member of the crew and was synchronized. But in the 1971 year, due to the inexpediency and lack of prospects, the project was closed.
Information