The world of tomorrow: military robots at a crossroads
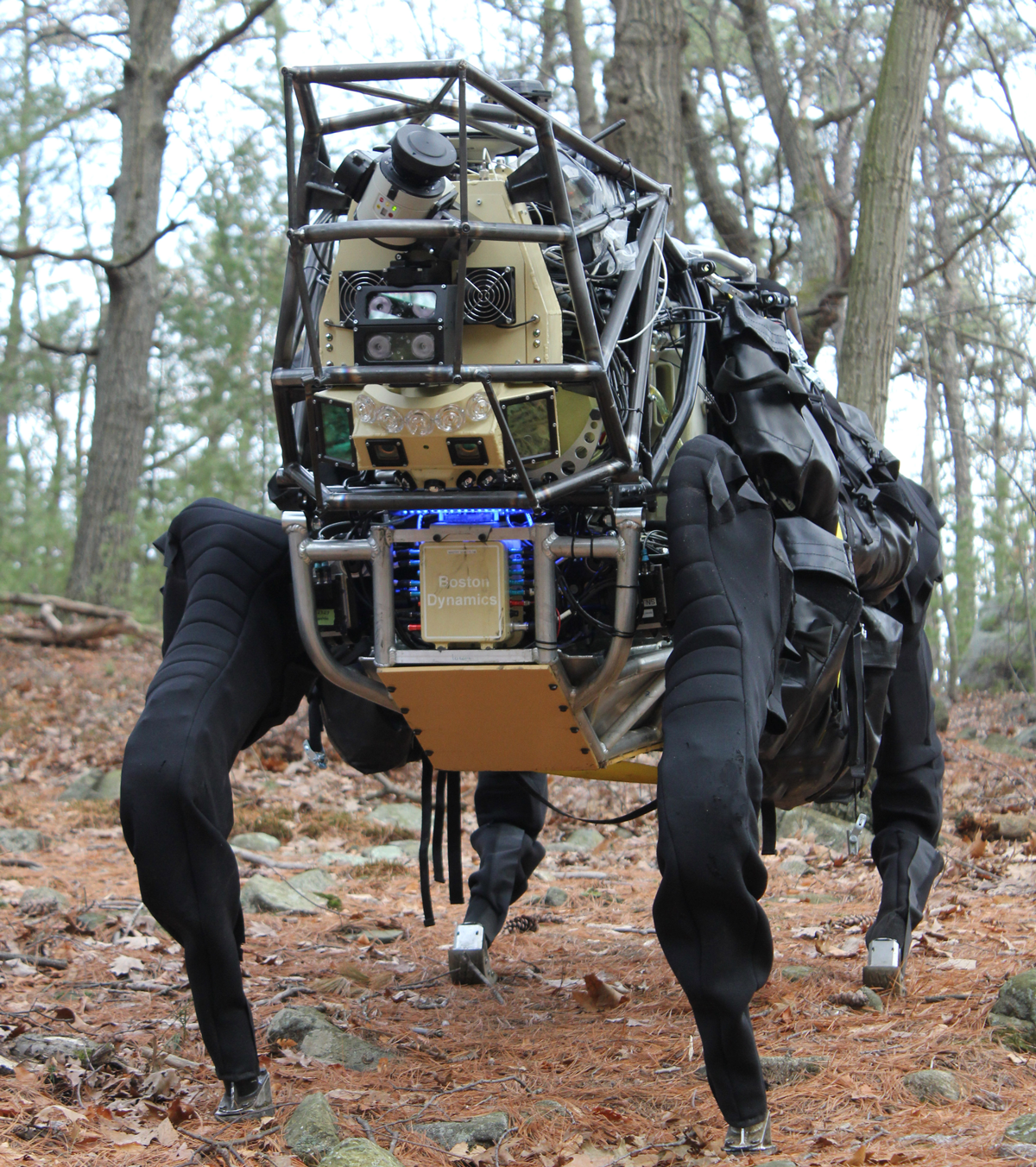
The LS3 robot is a new approach to the problem of mobility and the ability of systems to accompany deployed units.
The usefulness of automatic ground vehicles (ANA) in the entire range of combat missions today is no longer in doubt. Recent combat operations have served as testing grounds for a number of systems and have exposed the strengths and weaknesses of the military. robots. Consider a number of existing programs and the opportunities they will provide.
After several years of intensive operation, automatic ground vehicles were favorably accepted by users and military commanders, but at present the direction of development of these capabilities is at a turning point, since the systems now deployed are removed from the theater of operations and future requirements are defined.
The armed forces are faced with difficult choices: they need to determine which of the existing systems need to be left, what is no longer needed, where growth is needed in the short term, and how they plan to develop next-generation robotic systems that promise a qualitative change in their capabilities.
The US military today is armed with the largest number of ANA of various types and therefore it is clear that many armies of the world and industry are closely watching their plans.
However, the first problem that all US Armed Forces should solve is how to deal with currently deployed platforms, many of which were purchased under urgent funding programs, for example, on urgent joint prescription, and not in accordance with official plans.
“We have many robots that we have been purchasing for several years and are in what we call“ occasional work, ”explained Lieutenant Colonel Aaron Roberson, project manager for large unmanned vehicles at the Directorate for the Development of Joint Projects of Robotized Systems ( RSJPO). “We don’t know what to do with them, we urge the army to make a decision, since there will be no means to support them.”
Operational system requirements led to the fact that completely different types of devices were purchased and deployed. If such an approach met the needs of the time, then at present it presents a significant problem in the form of non-standard systems. Roberson further noted that the military is going to decide what to do with them and this decision should be taken seriously: “If we decide to get rid of them, then we need to understand that after we start the process, these systems will not be restored, because we we are going to get rid of not only the systems themselves, but also all of their parts and all that we have had to maintain them for several years. ”
Among the many ANA used by the US military, there are various modifications of the Talon families produced by ORotiQ North America and PackBot by iRobot, the drop-in vehicles, the RONS, and M160 remote ammunition system. This diversity confronts the US military one of the biggest problems — a small redundancy in the management and support infrastructure. The need to avoid proprietary systems and introduce an open architecture is a red line in several initiatives. This is especially true of the IOP program (Interoperability Profile - Interaction Parameters) of the US Army and the US Navy program for advanced priority AEODRS explosive ordnance disposal system.


Robot for remote neutralization of ammunition RONS
The goal of the AEODRS program is to obtain the next generation capabilities by developing a family of devices consisting of three options: Increment 1, a wearable system for dispersed operations weighing less than 15,9 kg, conducts exploration and threat assessment at a distance of 100 meters and has limited inspection and neutralization capabilities; Increment 2 weighing up to 66 kg for tactical operations, carried by two people, able to conduct reconnaissance and detect threats at a distance of 1 km; and Increment 3 - a trailer system weighing up to 300 kg, capable of lifting heavy objects. If the Increment 2 and 3 options are designed to replace existing systems, then the Increment 1 option is designed to fill the technological gap.
According to the head of the robotization department at the Center for the development of surface weapons of the Navy, Michael Del Signoret, the AEODRS program is designed to remove a number of restrictions that have been found on operating platforms. "These systems are built on different closed architectures, as a result, separate operator control units, separate supply channels and a very complicated and cumbersome process of modernization."
Its goal is also to solve such problems as limited autonomy, remote control, limited motor capabilities and degrees of freedom of manipulators; lack of situational awareness; low depth of perception of onboard cameras; and problems with communication range and bandwidth.
The latter is of particular concern: “The communication system has a more or less decent range ... but the channel width is limited and therefore some of the advanced features that we want to integrate, such as autonomy or the ability to provide bulk data, you cannot get at the current bandwidth ".
Del Signoret explained that AEODRS will seek to solve these problems by implementing a common architecture for the entire system family. Each option is divided into modules and the interfaces between them are determined by a common, state-controlled architecture that will install and provide physical, electrical, and logical (taken from the unified architecture standard for unmanned systems Joint Architecture for Unmanned Systems [JAUS] / SAE AS-4 Standard) interfaces, requirements for the characteristics of the modules, along with information on implementation.
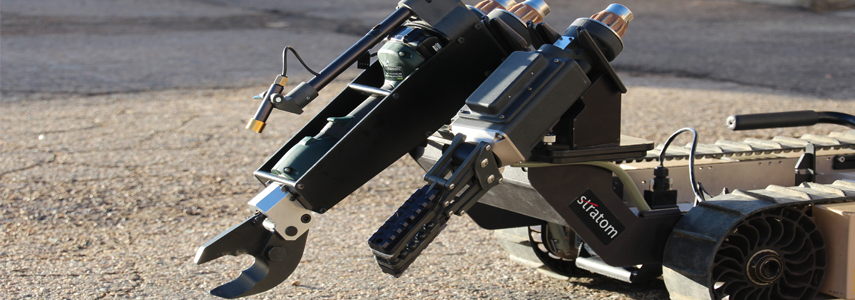

Stratom's ToolChanger can accept five different tools and automatically replace them.
However, AEODRS is not a thing “in itself”, it is created for interaction with other systems. “The AEODRS and IOP programs are closely intertwined with each other, and here the definition that AEODRS is really a specification of the IOP initiative is best suited. The AEODRS architecture on 95% is compatible with IOP and we are now working on harmonizing areas that are not compatible on 100%. ”
The Increment 1 and 2 options will incorporate more advanced features, including manipulation abilities required for solving tasks that require a two-hand task, intermediate point navigation, independent manipulations, the ability to create 2D and 3D maps in motion, independent tool changes from the onboard container and extended up to 12 hours.
“As a result, we will be able to give our users technology much faster. Because we believe that this will allow more “players” to stay in the game. Small robotic companies will now be able to access open architecture. We want to give the industry a debug model, then they can develop modules based on this model, come and demonstrate this technology to us. If this is what is needed, it will easily be integrated into our systems. ”
A number of systems that could potentially meet some of the requirements defined by AEODRS are already in development, although they may not be included specifically in AEODRS. The Adroit HDT Robotics arm has been assembled with 16 degrees of freedom, of which 10 have a drive and 6 (far pin hinges) are driven via differentials. Adroit hand weighs less than 9 kg, can lift 22 kg, and each hinge can rotate faster than 120 ° per second.
DADM (Dual Armed Dexterous Manipulator), developed by Northrop Grumman - also known as the Lobster - is being developed in collaboration with California-based Applied Minds. DADM allows commercial ready-made components to be widely used, and the whole system consists of two main elements: the DADM platform and the operator controller.
The manipulator is distinguished by two grippers attached to a common housing, each with 8 degrees of freedom that have very flexible capabilities. The configuration almost corresponds to the size and movement of a person, while the manipulators are designed to perform highly accurate tasks, such as unzipping a bag or cutting small wires. The control unit has a similarly configured set of operator handles, whose movements and input data copy the manipulators. It should be noted that in order to maintain a high level of manipulation capabilities and perform high-precision operations, for which DADM itself is intended, the 3-D video stream is output to the head-mounted display of the operator. It is provided with a high-resolution stereo camera and gives the depth of perception necessary to perform precise manipulation tasks.
The Northrop Grumman company for robotic systems also manufactured two tool containers. The British Army's Cutlass system has a container that can hold three different sets for robotic arms. The system is able to automatically change these sets without any signal from the operator, which eliminates the need to return the device to the user to change the working body.
IRobot has developed a similar system in collaboration with Stratom. The ToolChanger kit allows you to place various working bodies on the PackBot and automatically change them without operator intervention. In the suspension, installed in the rear part, the device accommodates up to five instruments; typical kits include wire cutters, rakes, blasting devices and manipulators. The tool connection head is integrated into the arm of the robot.
The IOP initiative, like the AEODRS program, focuses mainly on uniformity. A specialist at Joint Ground Robotics Enterprise explained that the IOP provides for its further alignment with a standard that is compatible with NATO standards STANAG and American industrial standards and the standards of the Ministry of Defense MIL-SPEC. In addition, military communications protocols will be developed for small automated systems, and a study will be conducted on the interface standards of the overall control architecture for such systems.
IOP and AEODRS are not the only activities to introduce open architectures and standardization. The Israeli company G-NIUS has developed the technology developed for its line of ANA Guardium and AvantGuard, and instead of the 12 “boxes” used before, integrated the robotic elements into a single unit. This main unit can be integrated into any ground vehicle, which allows, after some refinement, to turn it into an ANA. G-NIUS has demonstrated its ability to remake a wide variety of platforms into a tailless configuration. Today it is armored vehicles BMP, M113 and Stryker, HMMWV, Ford F-350 truck and quad bike.
In the meantime, the Turkish company Aselsan has developed a family of ANA with a common base platform. The Kaplan modular system (tiger) with an open architecture is capable of receiving various sets of equipment. These are mainly surveillance and reconnaissance systems, systems for fighting improvised explosive devices, but armed configurations are also possible.
Since the army is the largest user of ANA in the United States, it is possible that it has the greatest problems ahead in determining its needs and ways of channeling its resources.
The army has broken down its platform needs into four categories: wearable, transportable, self-propelled, and add-on modules. They also count on the development of a universal controller for unmanned aerial vehicles at battalion level and below, including small unmanned aviation complexes.
Lieutenant Colonel Stuart Hetfield, the head of the unit at Soldier Systems and Unmanned Ground Systems, explained that the army had planned long-term needs in advance for 30 years in order to ensure that all projects developed within five-year budgets were completed.
The strategic vision of the army on this issue envisages the creation of modernized forces consisting of manned and manned groups with improved defense, combat stability and survivability. It will also reduce the physical and cognitive load on the soldiers, use new tactics and increase the capabilities of the soldiers.
According to Hatfield, the army will achieve this by rebuilding and maintaining the selected emergency program prior to the implementation of the planned programs; cost reduction due to uniformity within classes; use of ready-made commercial technologies; the gradual introduction of autonomy in units; and finally, through user feedback, which is an integral part of the technology development process.
The army divided all its work into current, emerging and future programs, each with varying degrees of readiness and funding. Current funded jobs include the MTRS Increment 1, RONS and M160, while emerging needs (with no guarantee of completion) include the Robotics Enhancement Program (REP).
The REP is copied from the Soldier Enhancement Program (SEP), and is scheduled to begin in the 2015 year. Under this program, funding will be opened for the army to acquire commercial finished products and finished experimental systems, which, after evaluation, can be given either the status of transition to a planned program, or the status of content for a planned program. Lt. Col. Hatfield said that this was due to industry concerns that there were too many demonstrations without any return on investment. "This is not a golden ticket to the planned program, but at least it gives some return on investment in the hard work done."
Other short-term (2015-2020) and medium-term (2012-2030) targets include a new micro-ANA, Common Robotic Systems-Individual common robotic systems (CRS-I), a tactical Tactical Robotic Controller (TRC) and a multipurpose system for transporting compartment equipment Squad Multi-purpose Equipment Transport (SMET).
Work is underway on a new micro system as part of the Common Lightweight Autonomous Robotics Kit (CLARK) common light robotic kit program conducted by the TRADOC doctrine development and combat training department. Under the CLARK program, the department will be provided with a set of small robotic systems that can perform short-range reconnaissance with varying degrees of autonomy. The complete set will include an unattended ground sensor, a micro-ANA and a micro-UAV (with autonomous characteristics). The total mass of all components, including the common controller, may be approximately 4,5 kg. Developed semi-autonomous ultralight reconnaissance robot Ultra Light Recon Robot (ULRR) is designed to fulfill the role of micro-ANA.
CRS-I is a replacement for the Army Small AHA Program (small UGV –SUGV), which was closed in April 2013. The army is looking for a system that has two times less weight and two times less cost compared to the SUGV, and is awaiting approval of this requirement.

A remotely controlled combat support vehicle from Uralvagonzavod was supplied to the Russian army
To unload soldiers at the detachment level is another possible area of application for crewless systems. “We sent the SMSS (Lockheed Martin Squad Mission Support System) vehicle transportation system to Afghanistan; semi-autonomous system follows the soldiers throughout the battlefield and carries their equipment. However, in the Office of Testing and Evaluation weapons and military equipment reported that they do not trust the system and therefore it can not work in semi-autonomous mode. She arrived at the scene and we immediately received complaints that the batteries of the remote controller were exhausted, and the system was inconvenient in operation. Well, system design had its drawbacks. Remote control turned out to be redundant, this is an unnecessary mode that you should use when the device does not follow you. This completely changed the mind about him and his perception of the soldiers. The apparatus did not unload the soldiers; it is cognitive and physical exertion because they have to put their weapons in, take the remote control and control the system, which actually has to follow them on its own. Why did it happen so? Because those who evaluated and experienced this system did not have confidence in it. ”
However, the development of SMSS has not been completed; testing of the system continues in a number of roles, including work in conjunction with UAVs. Amalgamation of ANA and drone is a special target of the American army.
Among other major systems in the list of the army, there are systems for clearing routes of the Type 1 and 2 Route Clearance and Interrogation System, which allow you to remotely control High Mobility Engineer Excavator and RG-31 machines (both are equipped with different engineering equipment and devices to combat the VCA) respectively mine detection system on the Husky Mounted Detection System (HMDS). HMDS is an operating program, within which a system of semi-autonomous control of the Husky complex from a safe distance is developed.
Certification and existing security measures can significantly hamper the deployment of large ANAs, especially additional systems. “Nothing is perfect, we can never deploy unmanned ground systems and autonomous machines and expect trouble-free operation from them. But we have to develop this trust and confidence, to overcome this cultural barrier between what we expect from a person and that from a machine. ”
This may cause problems for the Autonomous Autonomous Mobility System CDD (now known as Autonomous Convoy Operations - ACO). ACO is an optional kit designed to transform existing crew platforms into unmanned platforms. “I think this is a very successful project, but there are problems ... I don’t think this is a technology problem in the context of whether we are ready to go this way. I see a problem in how we will use it, how we certify it, how we will make it safe, because testers know only how to test a truck with a person inside, ”explained Lieutenant Colonel Roberson.
Many of the future opportunities that the army wanted to have were developed as part of the canceled FCS (Fighting Systems of the Future) program. In accordance with it, a common robotic platform MULE (Multifunction Utility / Logistics and Equipment) was developed, which could be reconfigured for various tasks, including a combat support platform. After the abolition of FCS, the army continued to develop a combat version in the form of an armed robotic platform (light) ARV-A (L) (Armed Robotic Vehicle-Assault (light)), which, however, was also put on the shelf.
While the US Army retains the need for a promising tactical combat ANA, in other armies such systems are already in service. Several models of the ANA company G-NIUS are able to take weapons, and Uralvagonzavod developed a tracked system, which was put in the Russian army.
It is designed for surveillance and reconnaissance, as well as direct and indirect combat support. The device is equipped with a gyro-stabilized installation of weapons and a set of optical-electronic and infrared devices. According to the company, the device can operate at a distance of up to 5 km and move at a speed of up to 35 km / h; An encrypted communication system is also reported.
Although the mobility of basic platforms can be one of the low-tech barriers that need to be overcome, the solution to this problem is very important. “From my point of view, mobility lies in the question“ Can the platform keep up the pace of a unit or soldier, to whom the system is actually given? ”... I look broadly. I cannot say for certain that the system should have wheels, tracks or legs. This is not my business, my business is to look at the needs, look at the situation and propose a system that will work in this situation, ”said Lieutenant Colonel Roberson.
This is not only a problem for larger systems designed to support units, such as the Legged Squad Support System of the Marine Corps legged support system. This also affects small systems. Lieutenant Colonel Hatfield explained: “Mobility seems to be the main problem for all such systems, especially due to the fact that we are going to move to micro and nano-scale. For a micro-ANA or an abandoned robot, all that is on the way is an obstacle, but if it could hover above the floor for a meter or two, then it could have done a lot and opened up new worlds. Here the boundary between air and earth disappears. ”
Afterword
American market of automatic ground vehicles
The withdrawal of troops from Iraq and Afghanistan, as well as the radical revision of the US Army in February 2013, caused a rapid decline in the ANA end-user market. In accordance with the analysis, it is planned to transfer 2469 ANA to other structures and leave 2700 platforms for modernization and restoration.
In March, 2014 was added to the Pentagon 2015 budget for the Robotic Combat Support System (RCSS) robotic combat software, which provides for the purchase of M160, Man Transportable Robot System (MTRS) Inc. II and Robotic Clearance Integration System (RCIS) ). The contract also included an upgrade of the MTRS, providing the ability to carry out remote reconnaissance and neutralization of explosive items in situations where RONS is too large for this.
Upgrades include replacement of communication systems and unsuitable parts and components. However, there have been some minor changes in the financing of the AEODRS program. Date of commencement of production was postponed; The solution for Increment 1 was planned for the middle of the 2015 of the year, the start of production at the end of the 2016 of the year, and the implementation of the continuous improvement program was extended to the end of the 2019 of the year.
The project on robotized ground systems, Robotic Ground Systems, under which autonomous technologies are developed and demonstrated, underwent a small reduction in funding. There has been a significant reduction in the TS2 / Robotics Technology project, which creates, evaluates and studies autonomous technologies that allow robots to contribute to military tasks.
A new program for the tactical automatic ground vehicle Tactical Unmanned Ground Vehicle (TUGV) was launched, which incorporated the functionality of the common robotic system Common Robotic System (Individual) and a number of other emerging requirements for the development and testing of robotic systems.
As a result of all these changes, the size and structure of the market radically changed. The past five years have been dominated by sales for military operations in Iraq and Afghanistan. In the next 10 years, significantly lower sales are predicted, but with the possibility of a rise after about 2016, due to research and development planned for major initiatives, such as TUGV. It is assumed that in the past years of the projected ten-year period, production will grow, since large-scale production of new-generation modular systems will begin to meet growing demand.
Materials used:
www.janes.com
www.dtic.mil
www.auvsi.org
www.irobot.com
www.northropgrumman.com
www.stratom.com
www.uvz.ru
Information