Ground robots. From drop systems to unmanned convoys (Part of 2)

The German company Optimess has developed a two-wheeled iSnoop, which was equipped with two types of wheels, one of which is designed to move on stairs
Optimess: The German company Optimess has developed in the field of castable robots new iSnoop product. It is available with different wheel sets in order to obtain optimal mobility on different surfaces (including steps) and required speeds. Its wireless communication system provides an indoor range of 50 meters and an outdoor range of 200 meters.
A high-resolution camera with a pan function captures video images, and a microphone collects acoustic data. In addition to the standard camera can be installed other devices, such as gas analyzers. iSnoop can operate continuously for up to two hours, the robot is in the last stage of development and will be available in 2014 year.
Robo-team: A couple of years ago, the Israeli company Robo-team showed a lightweight, abandoned robot with a cute acronym Iris, meaning Individual Reconnaissance and Intelligence System - an individual intelligence and data collection system). He weighed one kilogram with two AA batteries, which provided the 4-6 hours of operation; The launch was carried out using the sling type throwing system. Over time, Iris has evolved into a pre-production product.
The original robot is very durable, made of composite materials and designed in accordance with the concept of "safe", which allows it to withstand a fall from 10 meters or touchdown after flying to 65 meters, which makes it possible for a robot with the "farthest drop rate" . It was equipped with a front-facing day / night camera with a ± 90 ° tilt mechanism, a laser pointer in the visible and near infrared spectral region and a microphone and a protected communication channel on 200 meters. Due to its symmetrical design, it could fall on any side and then be ready for work. The 175x205x95 mm dimensions allowed the soldier to carry Iris in his pocket. The robot had an unusual design, the front axle was much wider than the rear axle. The wheels were made of composite nylon, each had six spikes for hanging the grip on hard ground.
At the second stage of development, most of the elements, including the architecture, were retained. The concept of a sling was, however, rejected, although Robot Iris retained its ability to be abandoned. The size has changed to 229x203x94 mm, the weight has grown to 1,3 kg, but added a useful load capacity of one kilogram. The wheels have also been modified. Several Iris robots in this configuration were delivered to customers who used them for testing and operation, which allowed Robo-team to obtain invaluable data for the development of a production version, which was first delivered in June 2014 of the year. The asymmetric architecture of the proven concept was rejected in favor of the traditional rectangular shape. Picatinny guide on the top platform can accept devices that are connected via the RS232 connector, video / audio connectors or Ethernet, of course, after installing them, there is no question of throwing the robot. Robot Iris is equipped with brand new wheels, it retains the ability to climb stairs, and according to the company Robo-team, its capabilities have increased compared with the first models. It can overcome obstacles with a height of 64 mm and slopes of 45 ° (100% in transport terms) and has a maximum speed of 4,8 km / h. The data transmission system has the ability, self-healing, extending the range of the robot, especially in urban areas. Iris is controlled by the Rocu-5 block, which was developed along with the robot to offer a resistive, touch-sensitive screen that is readable in sunlight, compatible with 5 inches night vision glasses instead of the previous 4,3 inch touch screen. One finger joystick was left, and the number of buttons was increased to six, three on each side of the screen. The amount of memory has been significantly increased, added GPS, accelerometers and a digital compass, as well as front and rear cameras on the 5 MB. The continuous operation time is from 3 to 6 hours, but more importantly, the mass has been reduced from 700 to 540 grams.


The newest Iris from Robo-team has a fully symmetrical design and is equipped with a Picatinny rail, allowing you to install devices weighing up to one kilogram


Robo-team Iris robots are equipped with a communication channel that allows you to create a self-healing network, which allows you to increase the range of these systems when working in the city
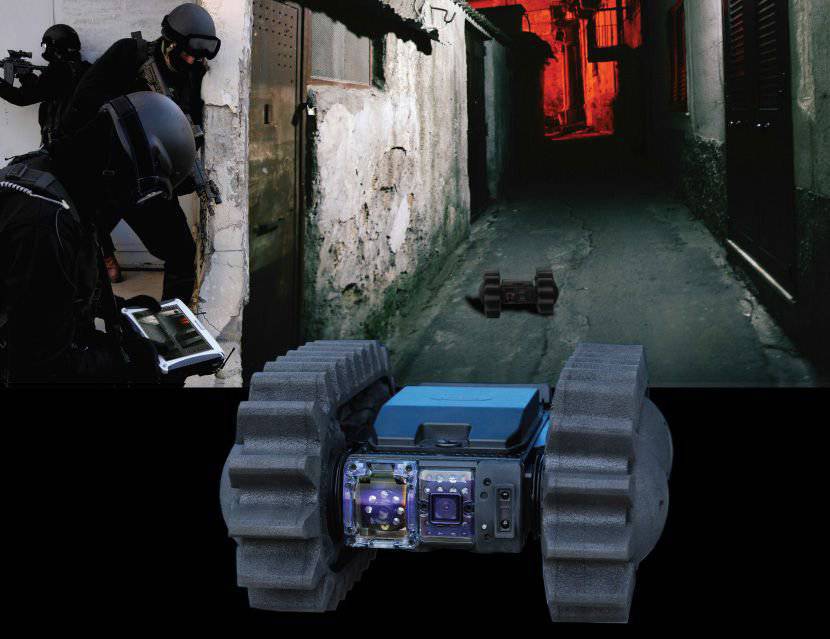
After the acquisition of ODF Optronics by the Mistral Group, the latter is currently promoting the EyeDrive robot
Mistral Security: In September, 2013, Mistral Group acquired the Israeli company ODF Optronics and de facto entered the community of manufacturers of ground robots. EyeDrive is designed as a supplement to the first throwable sensor created by ODF; The 4x4 configuration can be quickly converted into a crawler by adding rubber tracks to existing wheels with a slight increase in size to 350x320x165 mm.
EyeDrive weighs 3,76 kg, on each side is installed black and white on the 0,08 suite or color camera on the 0,19 suite. An additional camera with a laser pointer can be mounted in front to the right. It can turn right-left 48 °, visibility to the right is slightly reduced when installing tracks. A microphone capable of capturing sound from five meters away is also part of the touch kit. A one-kilogram communication module, connected via USB to a hardened notebook, provides a communication channel with the EyeDrive robot. The stated radius of action is 400 meters in open space and 70 meters inside buildings; robot control signals are sent over the 915 MHz channel, while video images are transmitted at the 2,4 GHz frequency. Lithium-ion batteries provide an average life of two hours (time varies by sensor used), the maximum payload capacity is 3,5 kg. As a rule, Israeli companies are silent about their foreign customers, but it is clear that the EyeDrive robot is in service with the Israeli army.

Adding a handle makes it easy to throw an EyeDrive or, in this case, transfer it to a dog



The British company Robosynthesis has developed a fully modular concept. The top photo shows the Robocube component on which most of the company's robots are based.
Robosynthesis: Categorizing ground robots is a daunting task. With Robosynthesis, this becomes even more difficult, as the British company has developed a fully modular concept that allows it to reconfigure the size, configuration and role of its robots. Plug-and-play (the principle of automatic recognition and configuration of connected devices) is a keyword in the Robosynthesis system. The modules, called Robocube, are key elements of the system, since they allow not only to perform specific tasks, but also have their own computing power. Thanks to the patented universal connector with a swivel lock made of non-metallic materials, reliable mechanical connection of the modules, connection of the power supply element, as well as a communication channel with high throughput, is ensured. Different modules, whether it be travel modules, sensor modules, power modules, computing modules, lidars, communication modules, tool modules, they are all assembled into a single robot in the style of the Lego designer due to the universal connector. The same system is used to install third-party devices. At present, the universal connector has been improved to increase the protection rating (IP rating) equivalent to diving to 100 meters; this will allow Robosynthesis robots to work in potentially explosive atmospheres.
The design is being analyzed so that modifications can be made that will make the connector really safe and subject to ATEX certification (EU directives describing the requirements for equipment and work in a potentially explosive environment). As for mobility, several wheel models were developed so that the robot could move in any type of terrain. When optimizing mobility, Robosynthesis drew inspiration from living things: hemispherical wheels for testing collectors and water lines were taken from arthropods that use rowing-like paddles to avoid getting stuck on stones or in vegetation, while “claws” imitate the work of insect legs and used for movement in all types of terrain. Driven tracks, usually not in contact with the ground, make turning over on obstacles into an advantage.
The robots from Robosynthesis used high-tech materials and technologies taken from Formula 1, for example, metallized polymers. They are much lighter than those made of standard materials, this allows them to have a greater load carrying capacity or a much longer operating time with the same set of batteries.
Among the smaller robots offered by Robosynthesis, we see Armourdillo. This is a portable, throwing, tactical information collection device that can be assembled around a module with a Robocube engine without tools in a few minutes. The robot provides an overview on 360 °, and its communication system can form a mesh network to increase range and increase functional flexibility through the use of several Armourdillo robots. The robot is very durable, starts at a removable rear lever. This lever is also used to increase stability and patency through obstacles. Driven tracks can also help overcome obstacles, and the wheel “claws” in off-road terrain. Four universal connectors are protected by removable covers, two on the upper side, one in front and one in the back; they allow you to take various devices with a total weight of up to two kilograms, but then you can’t throw a robot
Another product of the company Robosynthesis, which can be attributed to the "light" category is the Roboforce 1, in the configuration 4x4 its weight is 2,9; Two connectors at the top allow you to accept two different devices (maximum weight 2,5 kg). One connector can be used to install a second power module, which doubles the duration of one and a half to three hours. The robot's protection rating is IP 67, that is, it can be immersed one meter; It is equipped with a Super OFDM communication channel (orthogonal frequency division multiplexing) providing maximum bandwidth and range of 1000 meters in open areas and approximately 100 meters in urban buildings with indirect visibility. The Roboforce 1 has a front-facing camera on board, but various types of sensors can also be installed, including day cameras or thermal imagers. The robot can move at speeds of 4,8 or 10 km / h.
The Armourdillo and Roboforce 1 robots currently being developed are only two models from a variety of ground robots that can be “assembled” using the Robosynthesis technology; Among the several projects under development, there is also an amphibious platform.
Piap: This Polish company has developed a tactical abandoned robot Taktyczny Robot Miotany (TRM). Electric motors and electronics (including a camera, LED headlights and a microphone) are located inside the cylindrical body. Rear stabilizing tail with weighting on the end ensures proper movement. The weight of the 1,4 unit is kg, it can be thrown at 15-20 meters, and it can survive when falling from a height of 9 meters. Dimensions TRM 210x167x190 mm, it can reach a speed of more than three km / h, and the duration of continuous operation is one hour. His control station allows you to work with three robots at once, the shipping container holds three TRM robots and one control station. According to some sources, Piap is further developing its TRM and a new version of this robot will soon appear.
MacroUSA: Not only armies need robots. Every year, the US Navy and Marine Corps conduct thousands of so-called Maritime Interdiction Operations (MIO) maritime interdiction operations with the participation of VBSS groups (detection and detention of ships engaged in illegal activities at sea) that perform search operations that often take place in a hostile environment. Thus, in 2011, the Center for Space and Naval Systems conducted an assessment of several small abandoned robots and sensors at the customer in order to confirm the requirements and develop the basic operational parameters for the MIO robot. MacroUSA then received a contract for the design and development of two experimental systems, each consisting of one control unit with a display and two small floating robots Stingray. The development center requested a robot with a mass of approximately 1,5 kg, which would fit into a pocket of Molle standard (Modular Lightweight Load Carrying Equipment - a lightweight modular system for carrying equipment). With regard to mobility, it must overcome the usual obstacles on the deck, such as ropes, cables, anchor chains in height from 37,7 to 50 mm, and not be stuck in deck gratings. Often the ships' decks are covered with oil and mud, and therefore the robot needs sufficient grip to stay in place in these situations and to be stable when the seas are rough up to 5 points on traditional dhow sailing boats that are common in the Red Sea and Indian Ocean. The robot must withstand a fall from five meters onto the steel deck and be waterproof to a depth of one meter, while not only must it float on the water, but also float, for this purpose a float device is attached to it.
Also, optical-electronic sensors with the possibility of round-the-clock operation and a bi-directional audio system were requested. A remote-controlled gating device capable of attracting the attention of opponents or blind them in complete darkness was also on the list. Attachment points for the telescopic mast and the rope were added to it, plus one control unit for two robots, one controlled by the operator, and the other acting as a motion sensor to provide rear for the entire VBSS group.

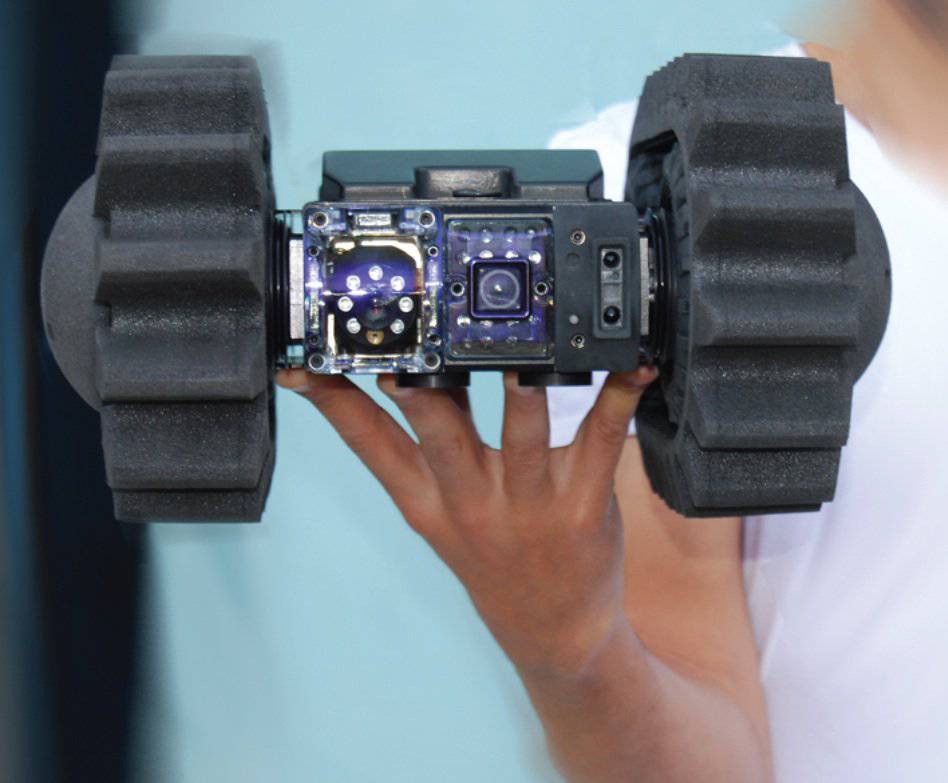
Stingray from MacroUSA was the further development of the Beetle robot, it was specially created in response to the needs of the Command of the Space and Naval Naval Systems in the robot for maritime interdiction operations

The latest version of the Beetle 1,8 kg mass can withstand a fall from a three-meter height to concrete and has a useful load capacity of 700 grams
In the MacroUSA catalog for several years, the Beetle robot has already been installed, which was suitable in size and weight, but did not meet many other requirements. One of these requirements was increased strength, the aluminum components of Beetle were not strong enough. The cost and machining issues “played” not in favor of using titanium, but in favor of a monolithic carbon fiber chassis with side panels made of aircraft aluminum, wheels and internal brackets made of carbon fiber, closed cell foam for buoyancy, which kept the mass within 1,8 kg The height is determined by the ability to overcome obstacles (to overcome the rope in 50 mm a wheel of almost doubled diameter is needed), the width is determined by the battery pack; the length of the sealed chassis required buoyancy were to be determined by the designers. Thus, the size of Stingray was 253,9x205,5x95,5 mm, which is almost 4500 cm3 volume - this limit value was set by the customer. Soon, MacroUSA abandoned active buoyancy support systems and offered a high-visibility buoyancy support device that wraps itself around Stingray to work in water and allows the robot to maintain ground clearance.
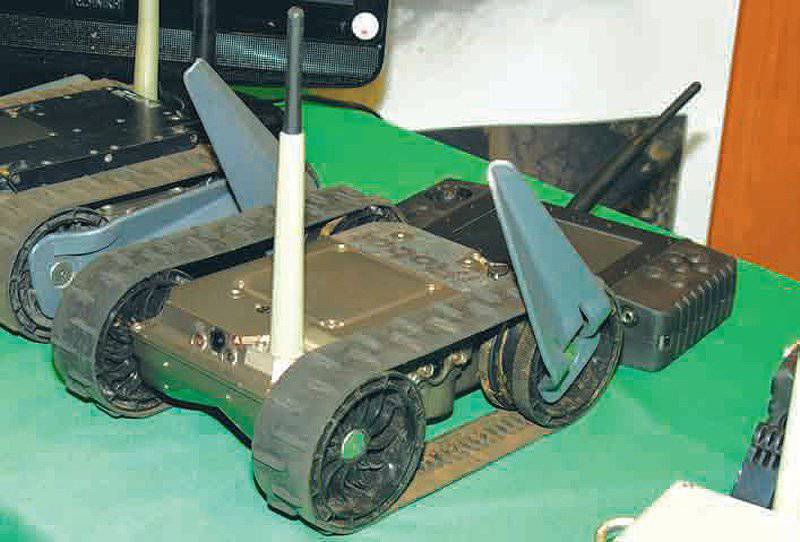
Mobility in water or grip on wet or oily metal surfaces has led to a compromise in wheel configuration. The final solution was the design with microbugs on the wheels and side projections with directional blades.
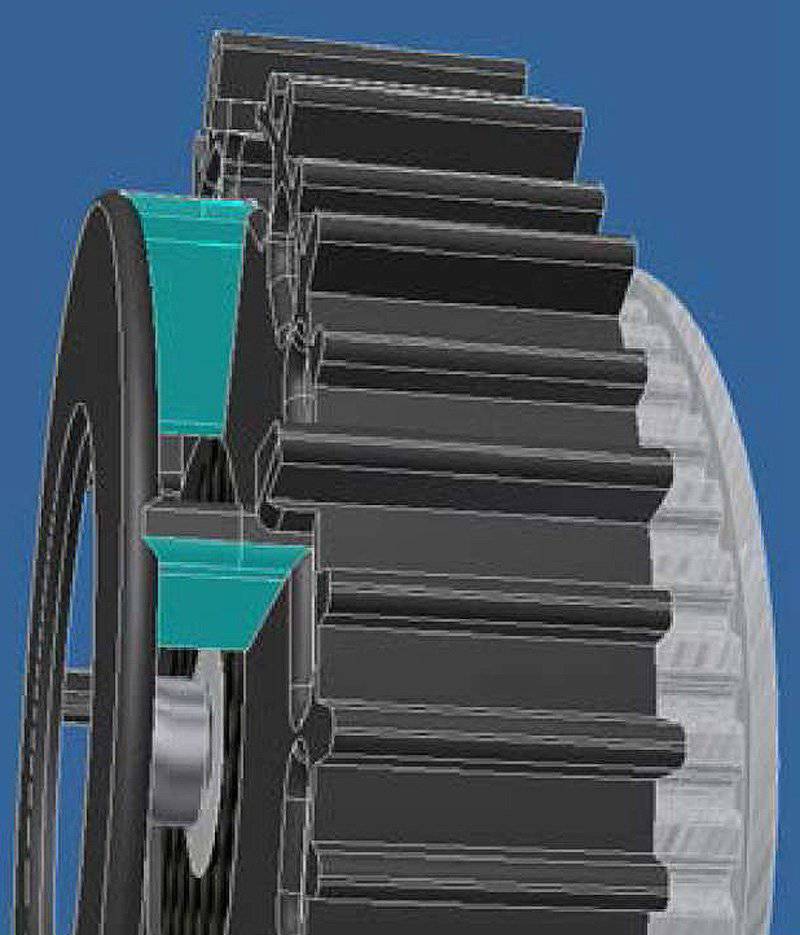
A close-up of the wheel of a Stingray robot with side projections with directional blades (turquoise)
The intermediate belt between the two axles helps to overcome obstacles. The Stingray robot is equipped with a day / night camera with an 50 ° field of view, which has an angle of inclination ± 85 °; video and control signals are automatically inverted when the robot turns over. In front of the Stingray LED white lights and infrared spectrum. On the Picatinny rail, you can install an additional device (maximum 700 grams) that connects to the robot via the RS232 connector. In this case, it is natural to throw the robot is no longer recommended. Batteries provide a working time of more than two hours. There are two data transmission channels: compression with orthogonal frequency division of coded signals provides video communication, while the robot is controlled by means of a channel with a wideband signal with frequency jumps. The radius of action in line of sight is 200 meters and in other cases 50 meters. As already noted, Stingray is a development of the previous model Beetle, which remains in the catalog of MacroUSA for customers who do not require the sea application of the robot.
Due to the fact that the military is increasingly taking part in anti-piracy operations, the company is currently awaiting the issuance of a contract from the command of the Navy’s space-based and naval systems (a request for a quotation for 200 systems has already been issued).
In the top row of the light robot category, MacroUSA developed Armadillo, which was offered in several versions. The robots of the Armadillo V3.5 and V4.0 versions with a mass of 3,13 kg and 3,70 kg respectively remain in the category of those being thrown, since both are able to withstand a drop from the height of the 2,5 meter or horizontal flight by eight meters. They can immediately begin to work after the throwing, since they have a completely symmetrical design, of course in this case it is not recommended to install any additional devices. Both versions are equipped with Picatinny slats and RS-232 / 485 connectors for installing or connecting sensors or actuators, such as explosive ordnance disposal devices, manipulators or rotating uncooled thermal imaging cameras, with a total weight of up to three kilograms. Both options have a circular field of view on 360 °, provided by day / night color cameras with digital zoom x2 installed on all sides. The front camera can be tilted on the V4.0 version. The remaining differences are minor: the V3.5 version has two cameras, front and rear infrared LED lights, while the V4.0 has one front-facing camera and LED lights in the visible and infrared spectrum that are directed to all four sides. Both robots are equipped with a microphone and an optional GPS system, as well as a digital accelerometer. MacroUSA uses a COFDM data channel (orthogonal frequency division multiplexing of coded signals) operating on the 1,2-1,4 or 2,2-2,4 GHz frequency bands (many other bands are available as an option for military customers), having an 300 line of sight and in indirect visibility 200 meters. Using their rubber wheels with a diameter of 130-mm, Armadillo robots can overcome 45 ° slopes. They can be installed kit to overcome the steps, which includes flippers and rubber tracks instead of wheels. The next version of the V4.5 was designed to offer higher speeds and greater payload. It has a greater number of connectors for connecting various devices and was specially designed for the disposal of explosive objects. He takes the starting position in any coups and is able to overcome the steps.

Robot Armadillo from MacroUSA is designed in different versions and can survive a fall from a height 2,5 meter. The robot was used by other manufacturers of their own robots as a base component.
Since many US programs have been closed, MacroUSA is now counting on exports and non-military use. The company is showing increased interest in some procurement programs in Europe, France and Poland, as well as in the Far East.
Armadillo V3.5 has become the reference point for Oto Melara's TRP3 robot. The basic robot was thoroughly reworked, for example, in the Italian company, the original electric motors were replaced with brushless motors. The data transmission channel was also improved, while the portable control unit was modified to meet the needs of the Italian army. The stationary control unit installed in the Freccia 8x8 machine, on the other hand, was created by Oto Melara from scratch. The new control unit is based on a hardened computer with a display of 13 inches, which is connected to the communication center with an integrated data channel. From the very beginning, the unit was created to control other ground robots developed by the company as part of the digitization program of the Italian army Forza NEC. When operated from a hand-held device, the TRP-3 NEC robot (as it is known) gains access to the Forza NEC network through a soldier’s personal programmable radio station. When controlling a robot, an onboard programmable radio station is activated for the operation of the robot. According to Oto Melara, the range of the control channel in open areas is 450 meters and in urban areas 200 meters. The robot was qualified by the Italian Ministry of Defense and the first batch of six robots is supplied to the Italian army.

Oto Melara's TRP3 robot was adopted by the Italian army as part of its Forza NEC digitization program.
The TRP-3 NEC robot will become the “perfect eye” of medium infantry regiments equipped with the Freccia version of the BMP. The TRP-3 NEC is slightly lighter than the original V3.5, but its dimensions are basically the same. The maximum speed is 1,8 km / h; The robot has six cameras: one day color and one night camera in front, day cameras at the back and sides, and the sixth is installed at the top of the robot for inspections under suspicious vehicles. Picatinny guide was integrated at the request of the customer in order to install a laser range finder, which with its integrated GPS and digital compass, allows the TRP-3 NEC to receive the coordinates of a potential target. The interface allows you to accept other types of devices.
iRobot: Among the company's products for military tasks, the smallest is the 110 FirstLook robot. Tracked, drop, self-leveling platform can withstand a fall on concrete from a height of almost five meters. Without on-board equipment, the mass is 2,4 kg, the 110 FirstLook robot develops speed 5,5 km / h, its rubber tracks guarantee good permeability on most surfaces. The device can withstand immersion by one meter, it is equipped with two flippers for overcoming obstacles and steps. Initially, flippers were flat, but at high temperatures, with which the US Army and Marines met in Iraq and Afghanistan, they tended to deform and were therefore replaced by stronger 3D flippers. The control unit resembles a game console in order to make it intuitive for young soldiers. Reinforced waterproof bullets have a five-inch screen with a resolution of 800x480 and a mass of 0,9 kg. The data link at the 4 GHz frequency (a solution for 4,9 GHz is also available) offers a range in line of sight of 200 meters. For other conditions, iRobot has specifically developed radio equipment that allows you to install a multi-node network between robots. Originally developed for installation on robots, now this equipment has been modified as a drop option.
The standard kit for the 110 FirstLook consists of four cameras of the visible / infrared spectrum (therefore, there is an infrared illumination on all sides) with x8 digital magnification. However, other devices can be installed for reconnaissance tasks on the optional Picatinny rail and in the auxiliary connector. The company has developed its own Idac intelligence kit (Integrated Deployment and Camera - Integrated Deployment and Camera) weighing 400 grams, which is a camera on a mast with 270 ° viewing angles, advanced to a height of 155 mm.
The FirstLook robot also supports various intelligence sensors. weapons mass destruction, such as LCD 3.3 from Smiths Detections, MultiRAE from RAE Systems and Radiac from Canberra. The 110 FirstLook robot does not fall under the rules of the international arms trade, it is in service with the American army and marines and is expanding its base of foreign customers.

With a weight of 2,4 kg, the FirstLook can be thrown a great distance, and its kinetic energy is enough to break the window and end up inside
Qinetiq: Dragon Runner 10 from Qinetiq North America is located on the upper boundary set for mini-robots regarding mass; It is the smallest member of the Dragon Runner (DR) family. The chassis can be either wheeled or tracked; changing one configuration to another is a simple and fast operation that is performed without special tools, the wheels change to drive sprockets and vice versa. The maximum speed is 6,4 km / h due to the unbreakable number of electric motors, which also allow to overcome slopes up to 100% (45 °). The slim body from the ground is in the 50 mm, a necessary feature when working in difficult terrain. If no devices are installed, the DR10 is completely symmetrical and can start working immediately after the throw.
The operator can control the robot through the front and rear day / night cameras, sounds transmits the onboard microphone. DR10 can be used with all QinetiQ management consoles. The operator sees not only the image from the cameras, but also the direction of movement and position of the robot due to the built-in digital compass and GPS. The line of sight in direct visibility exceeds 650 meters. Depending on the task and on-board equipment, the duration of work varies from two to three hours. DR10 is in service with US military and foreign customers, including the UK.


The lightest member of the Dragon Runner family, the Qinetiq DR10 robot can have both a wheeled and a crawler configuration and, in the absence of additional devices, is completely symmetrical and can be deployed by throwing

The new FistLook configuration from iRobot has new 3D flippers that have great strength, especially when working at high temperatures.
Information