Automatic cargo vehicles facilitate soldier labor on the battlefield
"Days of the donkey Eey". Mules of the pack transport company from the Indian service corps in the middle of the 30-s at the base located in the territory of present-day Pakistan

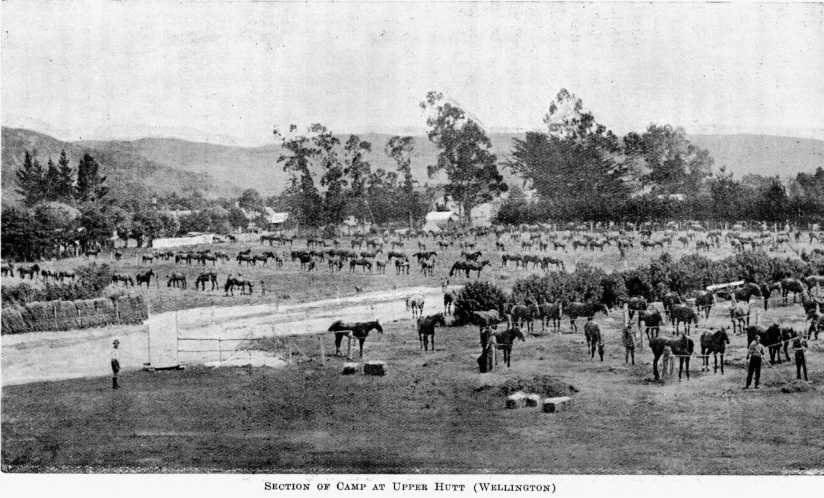
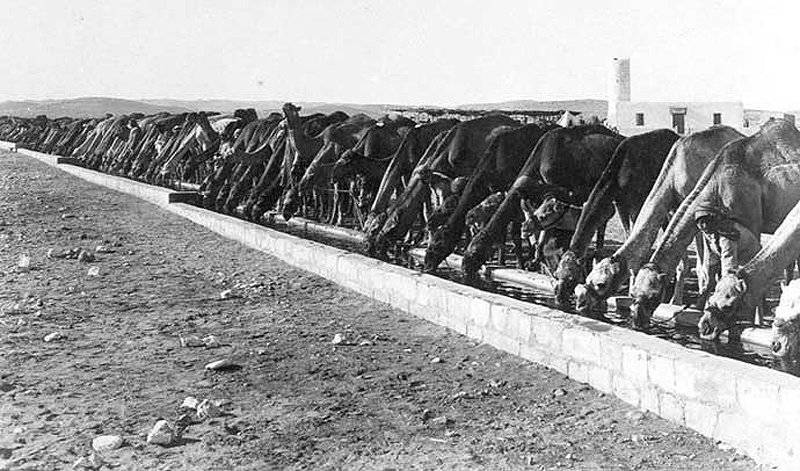
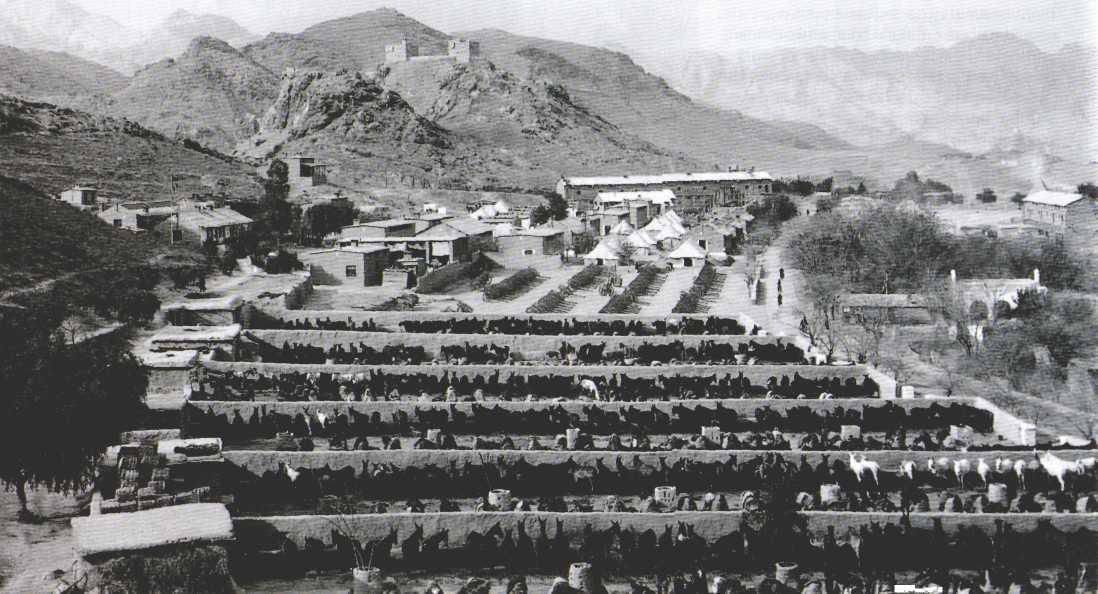
For centuries, pack animals of various species and subspecies have been used in military operations. As we see in archival photos - this is horses, and mules and camels.
Today, horse-drawn transport is mainly in demand among insurgents who are ready for slow animal movement, unpredictability and a significant amount of material and human resources in exchange for low cost and incredible adaptability to environmental conditions.
For the leading armed forces of the world, the presence of manned helicopters and all-terrain vehicles for supply was mandatory in combat areas, starting with the 60-s. Despite the speed and payload advantages they have over other ways of transporting goods, they are not always suitable for the logistics of combat operations, cost, availability, terrain, vulnerability or trivial caution affect. On the contrary, automatic supply systems are becoming more intelligent due to the need to reduce the negative impact of the combat load.
On a modern asymmetric battlefield, the rebels still willingly use time-honored such non-mechanized, inhuman logistic means such as pack caravans, while recognizing their unpredictability and the fact that they carry their own great logistic burden. On the other hand, it seems that the leading armies of the world are the least willing to turn back time, preferring to explore inanimate solutions in which, ironically, one can find mechanical analogs of mammals worth millions of dollars.
It is very likely that such inanimate supply systems might simply be abandoned once, regarding them as an “intricate and amusing” technology suitable only for home use. However, in recent decades, the use of robotized technologies has gradually expanded in the defense sphere and currently unmanned mechanical systems are considered as potential tools that reduce the need for human resources and save lives in the field of material and technical supply (and in any other as well).
Initially, these systems became interested at the command level, mainly for reasons of protecting their forces and saving human resources. Currently, however, an increased interest is also manifested at the user level, where a great deal of experience has been gained of the direct negative influence of the mass of combat equipment that a dismounted soldier must wear on a theater, for example in Afghanistan. If the capabilities of a soldier on the battlefield should not deteriorate due to excessive wearable weight, then, apparently, some form of mechanical assistance is urgently needed.
Ground-based automatic systems could, at a minimum, save lives and provide supply routes in the disputed territory. The additional "muscular strength" they provide could also strengthen the planned firepower and combat stability of infantry units at the forefront. They can be added to unmanned air supply systems with a power drive, most likely in the form of unmanned helicopters. This is, for example, the design of a Marine Corps for a promising cargo UAV (Cargo UAS) or missiles in a vertical launch container like the NLOS-T (Non-Line of Sight-Transport) missiles of the US Army, which offer potentially different ways bypass ambush and directional land mines through the use of the "third dimension".
With a constant shortage of human resources and border security requirements, the Israeli army was among the first to adopt an unmanned patrol platform in the form of the Guardium automatic ground vehicle (ANA). It was developed by G-NIUS, a joint venture between Elbit and Israel Aerospace Industries (IAI). The range of tasks voiced for Guardium includes patrols, route verification, security of convoys, reconnaissance and surveillance, and direct support of combat operations. In its basic configuration, the car is based on the TomCar 4x4 SUV, 2,95 m long, 2,2 m high, 1,8 m wide and 300 kg carrying capacity. The maximum speed in semi-autonomous mode is 50 km / h.
In September 2009, the company G-NIUS showed Guardium-LS, an extended version, optimized for logistics. It is based on the TM57 chassis and is similar to the machine adopted by the British army as the main habitable platform for supplying a company level called Springer. The length of the Guardium-LS is 3,42 m, it has an increased carrying capacity of up to 1,2 tons (including towed cargo). It can operate in controlled or automatic modes, it has the same set of systems as its predecessor in the patrol version, including the Elbitra / Elisra EJAB warhead muffler; an optical-electronic station IAI Tamam Mini-POP, consisting of a thermal imager, daytime CCD camera and eye-safe laser range finder; GPS navigation system; laser echo sounder (LIDAR) to avoid obstacles; and stereoscopic cameras. He also has “pursuit” sensors that allow him to automatically follow the instructions of a person or other vehicles in the convoy.


IAI's “Field Porter” Rex is designed to carry 200 kg of equipment, can be operated for three days without refueling.
Direct support of hostilities
Another potential assistant in the logistics of combat operations from the G-NIUS family is AvantGuard, currently also in service with the Israeli army. It uses Guardium control technology, but the platform is a modification of a Canadian tracked Wolverine tracked vehicle. It is smaller and carries the designation Dumur TAGS (tactical floating ground support platform). The four-wheeled vehicle has a four-cylinder Kubota V3800DI-T diesel engine rated at 100 hp, it develops a maximum speed of 19 km / h and can operate either in semi-automatic mode or it can be controlled from a wearable control panel. Its weight is 1746 kg, the payload capacity of 1088 kg, it can be used to evacuate the wounded and other logistic tasks.
A new model among the ANA is the "field porter" Rex, shown by IAI's Lahav Division in October 2009. It is based on a small robotic platform that accompanies from 3 to 10 soldiers in automatic mode and is capable of carrying 200 kg of equipment and supplies for up to three days without refueling. According to the company, “the robotic vehicle follows the lead soldier at a predetermined distance, while using technology developed and patented by IAI. Using simple commands, including 'stop', 'drive' and 'follow', the soldier controls robot without distraction from their main task. Controlling the robot in this way allows for intuitive interaction and rapid integration of the product into the field in a short amount of time.” The Rex measures 50x80x200 cm, has a top speed of 12 km/h, a turning radius of 1 meter and a maximum gradeability of 30 degrees.
Analogies with the canine family, but in a completely different implementation, can be seen in the four-legged device, developed by the American company Boston Dynamics. The project was funded by the United States Department of Defense Advanced Research and Development Office (DARPA) with the participation of the Marine Corps and the Army. Big-Dog is a robot weighing about 109 kg, height 1 m, length 1,1 m and width 0,3 m. Its prototype was evaluated at Fort Benning as an assistive device on foot patrols, carrying a 81-mm mortar with a base plate and tripod. A typical load of this prototype for all types of terrain is 50 kg (up and down the slope of 60 degrees), but a maximum of 154 kg was shown on a flat surface.
Movement modes BigDog include crawling at speed 0,2 m / s, high speed 5,6 km / h, trotting 7 km / h or “jumping gait”, which in the laboratory allowed to exceed 11 km / h. The main propulsion push-pull with water cooling power 15 hp, it drives an oil pump, which in turn drives four actuators for each leg. BigDog has about 20 sensors, including inertial sensors for measuring attitude and acceleration, plus sensors in joints for measuring movement and force of actuators in the legs; All sensors are monitored by an onboard computer.
The computer also processes IP radio signals received from a remote operator. He gives BigDog the necessary directions and speeds plus the stop / start commands, crouch, walk, go fast and run slowly. The stereo video system developed by Jet Propulsion Laboratory consists of two stereo cameras, a computer and software. It usually determines the shape of the surface directly in front of the robot and recognizes the clear path. Also in the apparatus BigDog installed LIDAR to automatically follow the instructions of the person.


Guardium-LS is an optionally inhabited version of the ANA G-NIUS Guardium, with which it has common control, visualization and electronic suppression systems. A mini-POP optoelectronic station is installed at the top of the cabin, behind which is a multi-element circular antenna of an EJAB explosive silencer

The BigDog four-legged robot, shown at Fort Benning's infantry center as a carrier for patrol teams, automatically follows a designated group member


The four-legged BigDog robot from Boston Dynamics / DARPA overcomes the snow-covered slope
Cross Country Walk
At an early stage, BigDog demonstrated that he could walk 10 km over rough terrain for 2,5 hours, but Boston Dynamics is currently working to expand the design constraints so that the robot can overcome even more difficult terrain, have rollover stability, reduced noise signatures and less operator dependent. The current announced goal of the LS3 program (Legged Squad Support System), under the supervision of DARPA, sponsored by BigDog, is the ability to carry 400 pounds (181 kg) for 24 hours.
[media=http://www.youtube.com/watch?v=OuGZjsKQxbI]
Demonstration of a robotized walking system for carrying LS3 cargoes to the commander of the Marine Corps and director of DARPA
A more or less traditional R-Gator procurement machine, developed by John Deere in collaboration with iRobot, can operate in manual or automatic modes. The car is equipped with a three-cylinder diesel engine with an 25 horsepower, six-wheel R-Gator has a 20-liter fuel tank, which is enough to overcome the 500 km. The transmission is stepless, the unit develops the maximum speed of 56 km / h in manual mode and 0-8 km / h in remote or automatic modes.
The machine has dimensions 3,08x1,65x2,13 m, own weight 861 kg, cargo hold 0,4 м3 and payload 453 kg (in tow 680 kg). The standard video system of the R-Gator includes fixed front and rear (for driving) color cameras with a field of view of 92,5 degrees and a stabilized panoramic view with magnification (25x optical / 12x digital) camera that rotates horizontally 440 degrees and vertically 240 degrees, has autofocus and sensitivity 0.2 Lux F 2.0. This camera can be replaced with an optional day / night optic-electronic / infrared camera with zoom.
The basic R-Gator communications kit (with 900 MHz, 2,4 GHz or 4,9 GHz frequency options) has a minimum 300 m control range, it is connected to an operator’s laptop based on Windows or a portable control unit. The GPS location system of the robot from NavCom Technology can be combined with an inertial system to improve accuracy. It is equipped with one LIDAR rear sensor and two LIDAR front-view sensors that allow you to detect obstacles at a distance of 20 meters in remote and automatic modes.
It is worth remembering briefly about the closed program, which was carried out by Lockheed Martin Missiles and Fire Control System with its ANA MULE (Multifunction Utility / Logistics and Equipment). It was one of the “cornerstones” of the ANA family of systems, originally considered part of the abolished army program FCS (Future Combat Systems).
It was assumed that the car will be manufactured in three versions: assault light ARV-AL (Armed Robotic Vehicle - Assault Light) equipped with optical-electronic and infrared sensors and a laser rangefinder / pointer for targeting; MULE-CM (Countermine - anti-mine) equipped with a remote mine detection system GSTAM1DS (Ground Stand-off Mine Detection System), which allows you to detect and neutralize anti-tank mines and mark cleared aisles, as well as perform limited detection of improvised explosive devices (IEDs) and other tasks for the disposal of unexploded ordnance; and MULE-T (Transport), capable of carrying 862 kg (otherwise for two compartments) equipment. All three options had to have the same autonomous navigation system from General Dynamics Robotics Systems, designed for semi-automatic navigation and detour obstacles.
The MULE device was specifically designed to support armored forces and had a commensurate rate of advance (maximum speed on the highway 65 km / h). In principle, it was supposed to have two MULEs each platoon, but then they revised this concept and defined centralized control at the battalion level.
ANA MULE had a total weight of 2,26 tons. The main frame was supported on six independent spring-loaded, hinged wheels, in the hubs of which the electric motors from BAE Systems were installed. This combined diesel-electric system was powered by a Thielert diesel engine with an HP 135 power.
Branch support machine
At the same time, Lockheed Martin was engaged in its SMSS support system (Squad Mission Support System), which it funded as an independent research project to meet the urgent need for a branch office with manned and automatic modes of transportation and logistics response. With a ton mass of 1,8, this platform 6x6 has a cruising range along the 500 km and 320 km over rough terrain. The machine can be controlled either by the driver on board, or by the operator remotely (“controlled autonomy”), or it can operate autonomously. The declared payload of the machine is over 454 kg, it is able to overcome the 588 mm stage and the trench 0,7 m wide. At full load, the cruising speed is 160 km on the highway and 80 off-road.
One of its features is the presence of a charger that is powered by a diesel engine and which can be used to charge the batteries of personal radio stations of the personnel of the department. SMSS can carry small ANAs, as well as two stretchers to evacuate the wounded. The front winch and attachment points at the rear are designed for self-pulling.
SMSS Block 0 prototypes were tested at the Army Infantry Center in Fort Benning in August 2009, after which the company manufactured the first two of the three prototypes of Block 1. They have attachment points for transport on the UH-60L helicopter's suspension, improved noise signature control and reliability, as well as an upgraded set of sensors to increase the level of autonomy. In the middle of 2011, two SMSS systems were deployed in Afghanistan for field test purposes, where its operational strengths were confirmed.
It is worth noting that at AUSA 2009 in Washington, Lockheed Martin showed SMSS with its HULC (Human Universal Load Carrying System) carry system. This exoskeleton with a power drive in addition to various tasks is considered as a useful addition to the SMSS as a means of unloading its goods on the “last mile”: the point at which the terrain becomes impassable for vehicles. With a body weight of 13,6 kg, HULC helps the owner to carry loads of weight up to 91 kg.
A pragmatic approach using the ANA technology was adopted by Oshkosh Defense for the DARPA-funded TerraMax project. It combines remote control and autonomous capabilities with a standard troop support vehicle, which is expected to reduce the number of people needed to carry out daily support columns in modern combat areas.
In the TerraMax team, Oshkosh is responsible for equipment integration, modeling, wire management, control point tracking, and overall layout. Teledyne Scientific Company provides highly efficient algorithms for performing tasks and route planning and high-level vehicle control, while the University of Parma is developing a multi-directional vehicle vision system (MDV-VS). Ibeo Automobile Sensor develops a specialized LIDAR system using Alasca XT sensors from Ibeo, and Auburn University integrates the GPS / IMU package (global navigation and positioning system and inertial measurement unit) and helps with the control system of the device.
The TerraMax is a variant of the 4x4 military MTVR truck from Oshkosh, equipped with TAK-4 independent suspension, 6,9 m long, 2,49 m wide, 2 m high and weighing 11000 kg with a payload of 5 tons. It is equipped with a six-cylinder, four-stroke, turbocharged Caterpillar C-121 diesel engine with 11,9 liter capacity and hp 425 power, allowing it to reach a maximum speed of 105 km / h. The autonomous control system of the device, developed as a set of devices, includes a video system with cameras; LIDAR system; GPS / IMU navigation system; automated electronic system with multiplexing Oshkosh Command Zone; navigation computers to summarize sensor data, map data management, real-time route planning and high-level control; as well as CANBus controlled brakes, steering, engine and transmission.



Lockheed Martin SMSS during tests at the Fort Benning training camp in August 2009. SMSS performs the functions of a dismounted department there.

The Lockheed Martin battery powered exoskeleton allows the wearer to carry 200 pounds (91 kg) to places inaccessible to ANA. The throw speed on a flat surface is 16 km / h
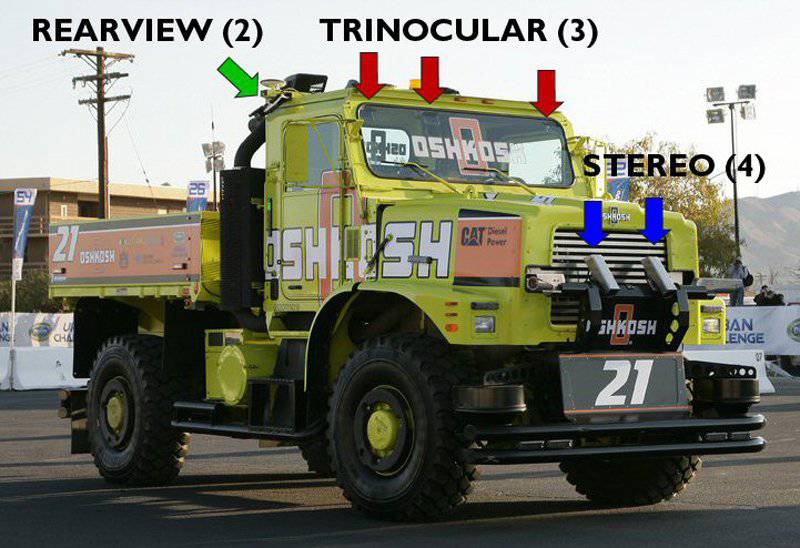

The Oshkosh MTVR TerraMax unmanned truck passes a road junction during the Urban Challenge test, followed by an escort vehicle. Such technology could be used in future convoys of combat support, saving lives and saving manpower.
Guide for convoys
By participating in various DARPA-sponsored robotic vehicle competitions, including Urban Challenge, Oshkosh signed a corporate R & D agreement (CRADA) with the American Army’s TARDEC armored research center at the beginning of 2009 to adapt TerraMax technology to the task of transport columns. In accordance with the three-year CRADA agreement, the CAST imitation system (Convoy Active Safety Technology) is installed on a TerraMax machine. It is intended to act as a route indicator for convoys and transmit information about the route to automatic vehicles following behind, while it must operate safely among people, animals and other vehicles. Subsequently, in March, 2009, the company Oshkosh announced the work with the research center of surface systems weapons The Navy is evaluating the use of TerraMax as a MTVR robotic truck (R-MTVR) in various combat mission scenarios.
Relatively recently, Vecna Robotics appeared on the market with its ANA Porter. It is described as a cross between personal cargo transfer systems and standard troop vehicles, and is intended for moving loads of weight from 90 to 272 kg. The mass of the base unit 4x4 is 90 kg, length 1,21 m, width 0,76 m and height 0,71 m.
It can be configured to transport various goods at maximum speed over 16 km / h, the maximum mileage is 50 km, depending on the terrain, powered by a lithium-polymer battery. The battery is charged in the field from an optional solar charging unit or generator. The maximum control distance depends on the line of sight (up to 32 km).
Porter, currently existing in the form of an experimental model, is offered with a semi-autonomous control kit, which is distinguished by controlling the position in the space for balancing the cargo, plus “follow me” and “convoy” modes or with an autonomous control kit including GPS navigation, route planning and terrain mapping. Among other tasks, several ANA Porters could be used in autonomous columns or perform joint perimeter surveillance.
The Marine Corps program for cargo UAV Cargo UAS is an example of finding the capabilities of a new generation of unmanned aerial delivery platforms. The Marine Corps Investigation Laboratory (MCWL) released a demand in April for the 2010 of the year for display in February of the 2011 of the year or earlier for a cargo UAV capable of operating in remote areas.
Captain Amanda Mauri, air combat component project manager at the MCWL laboratory, said that the requirements for cargo UAVs were mainly determined by the combat experience of Afghanistan. The MCWL lab worked with the combat development center and other corps agencies to determine the mass of reserves that a company size unit in Afghanistan could handle in one day, and came up with the figure 10000-20000 pounds of cargo. "As for the distance, the 150 miles route is a round trip, it is based on how much distance there is from the forward operational base to the forward bases, but apparently they are constantly changing," she said.

Computer-generated image of ANA Porter by Vecna Robotics, which has now passed the prototype stage.
Consequently, the capabilities claimed by the MCWL for the demonstration phase were to deliver at least 10000 pounds of cargo (in practice, 20000 pounds) for 24 hours to a distance over 150 nautical miles back and forth. The smallest element of the entire freight kit should be at least equivalent to a standard wooden pallet (48x40x67 inches), be at least 750 pounds at a real weight of 1000 pounds. It should be able to independently take off from the forward base or unpaved road beyond the direct line of sight, and also be controlled remotely from its terminal; cargo must be delivered with an accuracy of at least 10 meters.
The performance characteristics of the platform are the ability to fly at full load at speeds of 70 knots (130 km / h) at a height of 15000 feet and hover at heights up to 12000 feet. A UAV should also interact with existing aerial control agencies in the deployment areas, its radio frequency controls should be compatible with the frequency requirements in the deployment areas.
In August, 2009, in the MCWL lab, announced the selection of two applications for a cargo UAV competition: these are Lockheed Martin / Kaman K-MAX systems and Boeing A160T Hummingbird systems. The MQ-8B Fire Scout UAV from Northrop Grumman was excluded.
Lockheed Martin and Kaman formed the K-MAX team in March 2007; she integrated the Lockheed Martin UAV control system into a commercially successful medium-duty K-MAX helicopter, which is widely distributed in the construction and woodworking industries.


AirMule from Israel Aeronautics has an innovative internal propulsion system that allows you to work in a confined space.


A160T Hummingbird with cargo gondola on 1000 pounds
The K-MAX design is distinguished by two overlapping propellers with opposite rotation, which eliminates the need for a steering screw, increases lift and reduces the footprint; Kaman says that this allows all 1800 HPs produced by the Honeywell T53-17 gas turbine engine to be directed to the main screws, increasing the lift force. When transporting a maximum load of 3109 kg, K-MAX can fly at a speed of 80 nodes over a range of 214 nautical miles; without load, the speed is 100 nodes, the range of 267 nautical miles. Being essentially a modified manned platform, the K-MAX can be manned if necessary, since the onboard controls are left.
Jeff Bentle, Vice President of the Rotorcraft Program, said that “the team was focused more on meeting the requirements of the marines, and not on exploring other ways of developing the platform. He explained that the group was working on a modification of the aircraft and added a number of systems, including direct and indirect vision communication systems, a tactical data channel, a flight control system and a redundant INS / GPS system (both with redundancy). ”
Materials used:
www.janes.com
www.vecna.com
www.ir.elbitsystems.com
www.bostondynamics.com
www.lockheedmartin.com
www.oshkoshdefense.com
www.darpa.mil
www.aeronautics-sys.com
Information