The beginning of the path of walking robots
At present, various robotized systems are being actively put into service, and, in addition, a new generation of systems is being formed that can pass where people can pass. However, much more needs to be done before they can be seen next to you in the theater.
Land and air unmanned systems are an important tool for modern military, their use has become the norm, not the exception. The conflicts in Iraq and Afghanistan led to their exponential growth, billions of dollars were spent on the development and purchase of such systems.
While systems like the Reaper UAV attract a lot of interest, the performance of their ground-based counterparts also deserves all praise. Due to the fact that improvised explosive devices (IEDs) pose the greatest threat to the forces deployed in Afghanistan, the “hardworking” automatic ground vehicles (AHA) have come to the fore. These systems are daily involved in so-called “stupid, dirty and dangerous” tasks, and in the performance of their duties, they often receive damage, sometimes “lethal”. Despite the huge amounts of money invested in robotic systems, their field of activity is still limited to the tasks of neutralizing explosive objects, which, based on operational needs, is completely justified. However, at present, the functionality of the ANA is beginning to expand, they are increasingly performing reconnaissance tasks, and even the tasks of logistics.
There are opportunities to expand the scope of robotic systems and not only in the military sector. Advances in robotic systems could lead to systems that are able to work together and interact with humans on a physical or social and cognitive level. They will also, for the most part, be able to perform tasks for or with people in industrial environments such as factories. Military ground robotic systems, with many potential tasks, could be the best friend of every soldier, for example, could carry his equipment, conduct forward surveillance and even evacuate him from the battlefield. However, one big problem remains: the current systems, despite their abundance, cannot go where a soldier can go. Many ANAs have a high degree of mobility, but their wheeled and tracked configurations limit their use. To Robots able to become one hundred percent useful, they need to learn how to walk. "Walking" should become the only type of locomotion (a set of coordinated movements by which the robot moves in space), well, or at least part of the possibilities of a hybrid design.
For the most part, investment in walking systems was minimal, powerful defense enterprises barely touched this area, and specialized companies, universities, and research institutes "run the ball". While these systems, for the most part, received little attention, the capabilities of robots that can work side by side with humans or instead of them have not gone unnoticed. And events such as the DRC (DARPA Robotics Challenge - practical tests of robotic systems under the program of the Office of Advanced Research and Development of the US Department of Defense) provide effective support for these technologies.
Walking robots have many advantages: they are well suited for rough terrain, can climb stairs, overcome ditches and work where wheels and tracks cannot. These are complex engineering tasks, and significant resources are needed to take advantage of robots in civil and military applications.
One of the first tasks that the military consider for walking systems is logistics. In Afghanistan, in particular, due to the unfavorable environmental conditions and the aggressive actions of the rebels, there can be significant mobility problems, which can adversely affect the traditional material and technical supplies provided by ground or air platforms. Deployed personnel also carry more and more heavy loads, as the amount of equipment that they use in the process of service is constantly and rapidly growing.
Legged Squad Support System
To this end, the Marine Corps and the US Army some time ago studied the possibility of converting small manned vehicles into automatic systems; The army with notable success has already experienced a support system for the SMSS (Squad Mission Support System) from Lockheed Martin in Afghanistan. However, the main concern is the inability of SMSS and other similar vehicles to move where soldiers and infantry can move, which they should assist. The soldiers' display in Afghanistan has become such a serious problem that mules were called to serve in order to support the troops serving in difficult terrain. But this approach is only a temporary measure.
To solve this problem, the Marines are currently working with DARPA on a legged Squad Support System (LS3) leg support system. The goal of this work is to combine mobility and logistic capabilities in a system that could move 400 pounds (181 kg) of equipment over a distance of more than 32 km without having to intervene for 24 hours, and could also maintain the pace with the unit to which it was attached.
The four-legged LS3 robot became the development of the BigDog system, which was also created by Boston Dynamics. The last field tests of the robot were conducted in December 2012 of the year in Virginia; The two-week work was carried out in collaboration with the Marine Corps fighting laboratory. The LS3 legs have hydraulic actuators with sensors for distributing the forces and positioning all the joints. The system can run and maintain balance on loose, slippery and uneven soil, as well as rise when it loses balance.

The LS3 robot has a high degree of mobility and can carry considerable loads on itself.
During the test, five system capabilities were demonstrated: 1) voice commands; 2) night operations; 3) “go” orders; 4) perception of the environment; 5) intellectual foot setting.
The LS3 Program Manager, Lt. Col. Joseph Heath, identified operational reliability and platform perception as the main tasks to be solved for this system. While the first is an engineering challenge, the second will require improving the cognitive capabilities of the system. This problem of robotics is not solved so easily, and it needs to pay a lot of attention.
If robotic systems, walking or of any other type, must work in a real situation, their awareness of the surrounding space in which they are deployed will be a key condition for their effectiveness.
The goal of the LS3 program is to operate the system without increasing the cognitive load on the infantrymen. To achieve this, cognitive load must be placed on the system itself.
“If you want the vehicle to be remotely controlled or simply follow the operator, I think the software is not a problem in this case. If you want it to move by itself and walk through the forest without personal control, then suddenly you find yourself at a completely different level of complexity, ”said Professor Gregory Dudek, director of the school of computer science and former director of the center of intelligent machines.
“We have a walking machine, he can study and remember what a given terrain is like, and therefore, if a robot encounters the same terrain again, it does not need much time to understand, he has already learned the properties of such a terrain. This is doable, but it can be difficult ... The ground environment is perhaps the most difficult: many obstacles, many variables and many interactions. And walking systems, because of their versatility, also have more different types of failure, they can stumble, fall, kick something, but they push the boundaries of what we can do. I think that walking systems are related to very complex devices, but, as already mentioned, the problem of walking mobility itself - where to put your foot - even in such a complex system as LS3, is solved quite well. "
[media=http://www.youtube.com/watch?v=OuGZjsKQxbI]
Video of Legged Squad Support System’s walking support system (with my subtitles)
Professor Dudek believes that the main task is to provide systems with the ability to perceive at a distance: “For example, try to estimate at some distance, in advance, your ability to overcome a pile of construction debris before you step on it. I think there is still a lot of work to be done in this direction. The question is not only whether the robot can or cannot go somewhere, but how quickly it can; it will be important to have the ability to predict task performance in different scenarios. If you cannot predict the performance of your task, then it is very difficult to choose a sequence of actions. ”
In order to improve the process of perception of robots and allow them to act independently, it is important to empower them with learning abilities. Although sensors can provide situational and physical awareness, it is only through training that robots can learn how to best interact with their external environment.
“Non-cognitive robots are stupid because they make the same mistakes again and again,” said Professor Peter Jonker from the Institute of Robotics at the University of Delft, which specializes in engineering and robot / human interaction than in defense applications. Cognitive systems learn to recognize and obtain information about objects and their properties. Progress in the perception and training of the robot is partly due to the ability to create large reference tables, they are formed from cognitive dependencies between the input and output data; This was made possible by improving data processing and increasing the amount of memory on board the robots. “Even 10 or 15 years ago, we did not have such a huge memory ... and now we have gigabytes of memory, so we can store everything in reference tables and it works. Apparently, it looks like the work of the brain and the system of concepts and attitudes here are exactly the same, ”Jonker explained. In addition, an important role was played here and increase computing power.
The use of robots in the real world
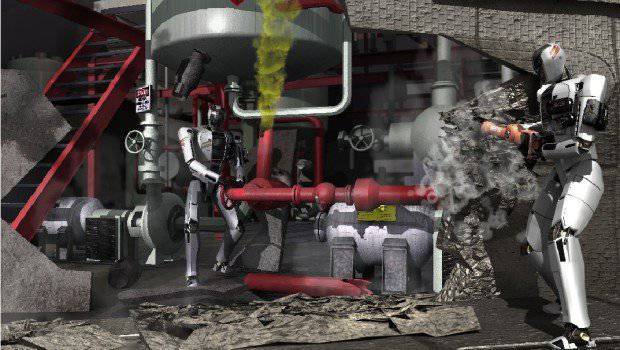
DRC testing is at the forefront of the development of functional robots with applications in the real world, in this case assistance in disaster areas. They bring together issues of perception, mobility and utility, they are distinguished by several unique features associated with a person. One of them is the external conditions in which the robots must work. DARPA acknowledged that disasters and catastrophes occur mostly in an environment designed for human use, it is not messy and structured.
Currently, the tasks envisaged by these tests (competitions) include: driving a universal vehicle; movement under the course through a heap of stones; removal of debris from the doorway; opening the door and entering the building; climbing the ladder and then further moving around the building; using tools to pass through a concrete panel; detection and closing of the valve near the flow pipe; and replacing components, such as a water pump.
DARPA did not publicly provide information on the level of autonomy that robots should have, but voiced at the beginning of the competition that the tasks would be set in such a way as to emphasize the importance of autonomy of robots at the complex task level, for example, the robot would be given the command to open the door independently instead careful control. DARPA will also change the quality of communication channels during testing and gradually reduce it to see how robots will cope with their tasks in such conditions.
Professor Dudek said that the level of autonomy of robotic systems is always a controversial issue. “Talk about how much autonomy will be in these systems, I find empty. If you want them to work well initially and fit you, it’s not necessary that they be too autonomous ... Some technologies are well understood and work well, but I think it’s a bad idea to make them autonomous in the near future ... just because When a problem arises, the question is: who will take responsibility? ”
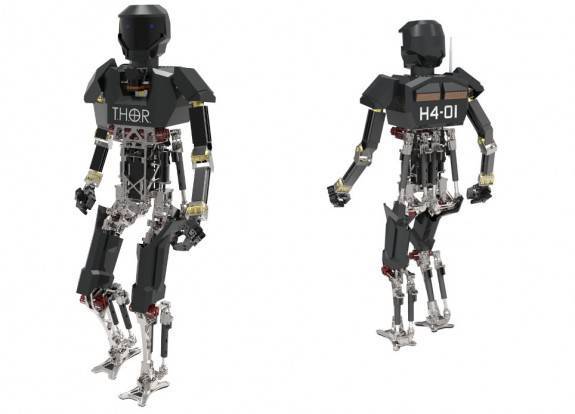
Virginia Tech Team Presents THOR's New Humanoid Robot at DRC
[media=http://www.youtube.com/watch?v=_FcmRM9m13A]
Video presentation of the THOR robot by the Virginia Tech team
Humanoid systems
Although the DRC project does not specify the configuration of the robots participating in it, several teams presented two-legged humanoid models. The same applies to government-provided systems.
The question of what form walking robots should take is hotly debated, while the answers obviously depend on the role of the system. Many ideas emerged regarding the use of humanoid models. “This is a controversial issue,” explained Dudek. According to him, “if you interview 10 robot specialists, you will get three or four different answers, and to some extent these answers are predictable, based on the geographical position of the person ... There is a clear separation between Japan and humanoid projects from Western Europe, the US and Canada. My own opinion is that the humanlike bipedal locomotion is not what we need right now. ”
Humanoid constructions have two key advantages: one of them is that their shape allows them to fit well for work in an environment created for people; the second is that people are more likely to accept humanoid robots. Dr. Heike Valleri, a biomechanical engineering specialist at Delft University, explained: “Kinematics and human controls developed together, an optimal model was found, including from an energy point of view ... Therefore, if we make robots with similar properties, then they will probably behave just like people. ”
Several teams competing in the DRC presented projects that deviate somewhat from the humanoid concept.
At the beginning of 2013, a team from the National Robotic Engineering Center at Carnegie Mellon University (CMU) announced the details of its member. The highly intelligent mobile platform of this university, created by a team called Tartan Rescue, received the designation CHIMP (CMU Highly Intelligent Mobile Platform). It is a human-sized robot that moves on rubber tracks built into each of its four limbs, rather than walking like a human.
The rationale for this approach to mobility is that driving on tracks offers greater speed and is simpler than developing a walking solution. If necessary, CHIMP can also move on the tracks of two limbs, for example, when it is necessary to use two other limbs to perform difficult and complex tasks.
According to Tartan Rescue team leader Tony Stents, the DRC tasks are likely to be “sharpened” for the characteristics of mobile humanoid robots, but in this case, the complexity, power consumption and more computing resources are required.
CHIMP is able to capture and control objects with its four manipulators at the end of each limb. He also has almost human strength and agility.
CHIMP uses onboard sensors to build 3D models of the surrounding world with textures that provide situational awareness and allow it to maintain balance. The same model is provided to the operator for visualizing the location and orientation of the robot.

The CHIMP robot has a hybrid design, in which the advantages of wheel locomotion (movement) are combined with the ability to climb stairs and manipulate objects.
The development team points to the controlled joints of the CHIMP robot, developed by the national robotic engineering center, as key elements that will allow you to perform various tasks within the DRC. For example, three joints in each limb allow the robot to have a humanlike grip. Other key features include the “receptive” head and hinge sensors, which provide feedback to the system and allow the robot to move, hold objects, collect garbage and construction waste in a safe way.
“Personally, I think this is the right direction,” said Professor Dudek and added: “I think with purely humanoid models it is very difficult to achieve efficiency in terms of cost and reliability, even though DARPA tests are in many ways designed to emphasize the need for a humanoid robot. The fact that you see people who are not seeking to create humanoid models for a competition that is intended as a humanoid competition speaks about something. I believe that no matter who wins the DARPA competition, it will have an impact on the development of robotics psychologically, even if not with the optimal design, since the answers to some of the questions will be given by the final results of this project. ”
Dr. Valleri believes that humanoid types of robots will not be widely used: “I do not think that anthropomorphic structures will be widely used, of course, with the exception of arms and legs; In the future, there will not be a lot of workable humanoid robots. ”
Works on biomimetic projects (imitation of biological creatures) are not limited to humanoid platforms. The Boston Dynamics company and the team from the biomimetic laboratory at the Massachusetts Institute of Technology are developing robots that are a further development of the Cheetah project ("Cheetah"). These systems have demonstrated the ability to run at a decent speed. The Boe Dynamics Dynamics Cheetah robot holds the world record for walking robots, reaching a maximum speed of 28,3 miles / hour (45,5 km / h). The next generation of Cheetah robots, called the Wildcat ("Wildcat"), will be able to work without a tethered cable. The first Wildcat trials have recently begun, and practical tests in the open air are scheduled to take place at the end of 2013. After all complex engineering problems are solved, systems of this type will find application in reconnaissance and search and rescue operations.
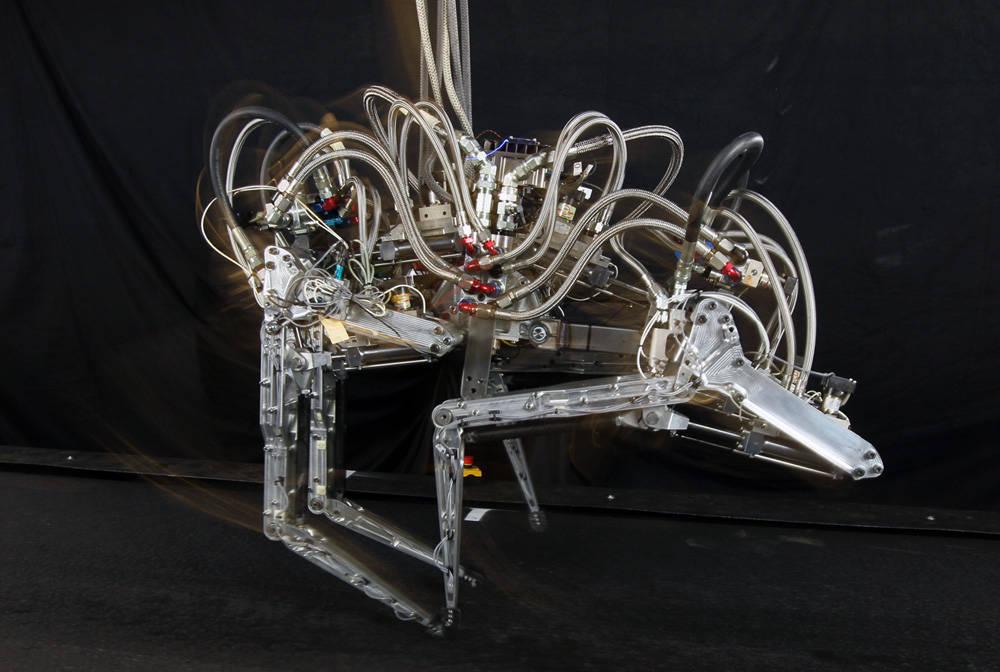
Cheetah walking robot holds world speed record for similar systems
[media=http://www.youtube.com/watch?v=chPanW0QWhA]
Cheetah Robot Record Run Video
Many biomimetic systems have been developed, among them there are designs inspired by, among other things, cockroaches and stick insects. Some robots have the ability to climb walls; their multi-legged configurations allow for very high levels of mobility and stability.
A problem that Dudek believes may arise for cognitive systems is their certification for safe use, since their behavior and capabilities change in the learning process. Due to the stringent requirements imposed by the Pentagon, anotherоThe greatest difficulties will be experienced by the system for the military. "Military systems tend to push the limits of their autonomy, but at the same time the cost of failure increases."
Energy consumption is perhaps the biggest and most difficult task for designers of walking systems. Their complex designs with hydraulic and electric servos consume a large amount of energy, and current energy technologies cannot solve these needs. In the LS3 robot, this problem was solved through the use of a traditional internal combustion engine, but this is not suitable for all systems and requires a significant breakthrough in energy storage technology.
“We still have very big energy problems. We still have problems with transporting enough energy that would allow the systems to be quite efficient and truly autonomous, ”said Dr. Martin Wisse, specialist in walking systems at Delft University of Technology. Professor Dudek believes that the robotics industry can usefully take development from other areas to solve this problem: “I think that other industries will give a driving impetus, since the management of power supply for mobile devices is a huge problem in many areas, for example, in electric vehicles and portable electronic devices.
Robots can get benefits in other industries, not only in the energy sector. After all, sensory systems needed by robots are mostly developed elsewhere and mostly correspond to current requirements.
“I do not see sensory systems as an area where serious revolutionary research can come. I believe that getting high-performance laser rangefinder scanners, small and cheap, is a problem that needs a lot of work to solve. This should happen and much will be solved in the civilian sector, ”said Dudek, explaining that“ laser and lidar technologies (laser locators) have become extremely popular, the power of these devices has increased, but their use in walking systems is a headache. The cost of the system immediately rises, so it is very important to achieve a cheap, reliable lidar that would withstand shocks and shaking. ”
Available technology
Dr. Wisse noted the availability of a single sensor, assessing it as an important breakthrough: “3D vision is developing, and the considerable merit of this is Microsoft's Kinect sensor. The real market for it is much larger than the market of robotic systems, so there is no need to develop something similar in robotics. ”
Wisse recalled another development that came from software. He said that the open operating system for robots Robot Operating System allowed robotics to write code that can integrate sensors such as, for example, Kinect, with robots.
From a mechanical point of view, complex tasks seem to focus on reliability and reducing the mass of materials and components.
“I think the real problems in deploying such systems are somewhat prosaic, the question here is how to handle mechanical breakdowns and make the system reasonably reliable,” Dudek said. - Robotics especially need the reliability of their systems, especially walking robots. Walking systems will have large vibrations, so everything that you embed in these systems should be resistant to shaking ... therefore the requirements for power systems, batteries and other components are high. This is a big problem".
Robots of one American company demonstrate how functional modern systems can be. Dr. Wisse remarked: “Systems from Boston Dynamics cope with engineering problems well. We just need all the components to work smoothly and be reliable - this is a question of money and good design. ”
Dr. Valleri noted the importance of creating lightweight robots for general security. “There are many reasons to make robots easy; you need less energy and it is less dangerous. If you make a humanoid robot, most likely it will work alongside people. ” She believes that work is needed to improve the actuators and that they should be easier and more effective.
Dr. Wisse believes that there are obstacles not only in the form of large technical difficulties. The current approach to the development of robotic technology does not bring much benefit to the industry, and changes are needed in this regard. “I think that real development will be only if we find the scope and find a large group of users for our technology and sustainable business that pays for continuous development. I really think that we need to take a look at what we can use right now in order to improve people's lives ... I believe we should work in a step-by-step, step-by-step mode, we should do everything to create and use markets, and do not create technological roadmaps, where we will focus only on the development of technology. I do not think that the way forward is the creation of more advanced humanoid robots in a given period of time, I believe that robotized technology can become cheaper due to the widespread creation of mass markets. ”
Information