Autonomous offshore platforms at Euronaval

The catamaran Sterenn Du was specifically designed to work with autonomous underwater vehicles in the open sea and in adverse weather conditions.
Unmanned marine systems, along with clear advantages, face challenges that often differ from UAVs and ground-based unmanned systems. For example, when performing tasks on long-term patrols at low speed, the choice of the size of a manned spacecraft is largely based on the need for comfortable crew accommodation, this problem does not apply to automatic surface vessels, Unmanned Surface Vessel (USV).
On the other hand, manned ships have a longer cruising range and greater payload due to their size, and no one is interested in sea drones weighing several hundred tons. This means that either a mother ship is required to use the ANS (launching and receiving techniques are still under development) or its use can be limited to the coastal zone.
Therefore, the introduction of ANS and autonomous uninhabited underwater vehicles (AUV) may be more a matter of adapting basic technologies to the concept of their application, while at the same time using new technologies rather selectively.


At the end of October 2012 at the Euronaval exhibition in Paris, the French company presented the results of its efforts combining solutions for ANS and ANPA by creating a unique system that includes the three new technologies to be the first in the world. The Espadon (swordfish) project, launched by the French purchasing agency DGA in July 2009, is currently being implemented by a team within the Navy DCNS group, a company specializing in robotics, ECA and Thales.


The Espadon has a length of 17 meters, weighs 25 tons, is the ANS catamaran, named Sterenn Du ("black star" in Breton). Due to the fact that the current French law prohibits the use of uninhabited surface ships, the Sterenn Du has a small cockpit that is not installed along the central axis of the vessel, like a carrier aircraft cabin. However, the Sterenn Du can also be remotely controlled or fully autonomous.


The main task of Sterenn Du is to deploy AUV. It will be delivered as close as possible to the deployment area by the special mothership (Mothership) with a displacement of 2500-3000 tons, which will remain at a safe distance from the minefield. On board the Sterenn Du are three AUVs, developed by ECA, which possess equipment for searching and destroying mines.


The biggest technological difficulty was in designing the system for automatic launching and receiving devices, Espadon’s ECA project manager at ECA, Stephane Meltzheim, told Aviation Week. In the open sea, it is more difficult to automatically dock two spacecraft than in outer space. There are currents, wind and waves, and the DGA organization requires ships to be able to function at sea with waves of 5 points. Traditional minesweepers are not able to work with waves more than three points.
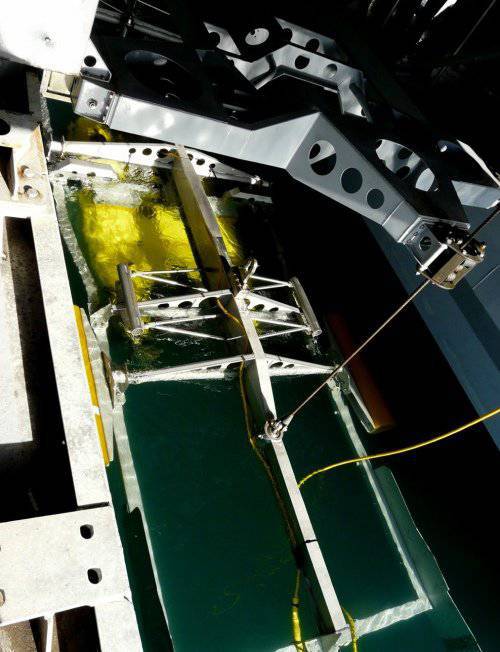

The solution resembles a hose used to refuel in the air. For the first time in the world, Sterenn Du applied the solution in which the ANS unwinds the cable that captures the AUV, and then the cable pulls the AUV into the compartment located between the two catamaran hulls, then the next AUV. Meltzheim proudly adds that on this patented ECA system, the success demonstrated in tests is close to 100%.
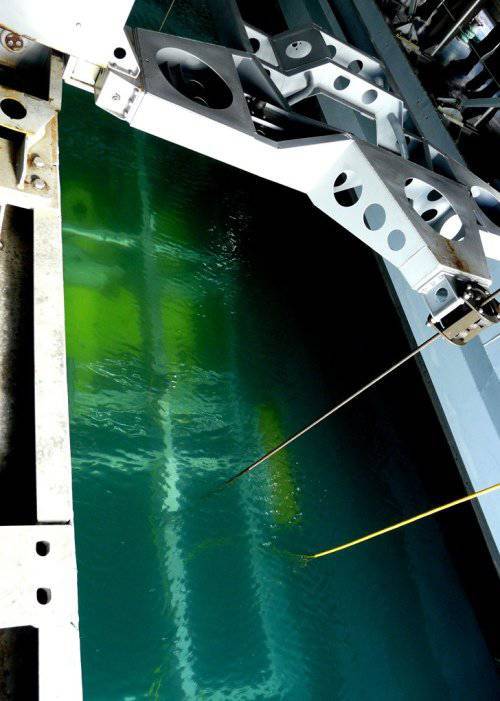

The next innovation is active and passive shock-absorbing systems in the compartment. This means that the AUV will remain as stable as possible despite any movements of the vessel. Once the AUV is in the compartment, it is delivered inside the Sterenn Du.
Each of the three AUVs is assigned a specific role. The first is run by the AUV DCL (Detection, Classification and Localization, Detection, Classification and Localization). It is 5 meters long, weighs from 800-1000 kg, has a cruising range of 25 miles, and the autonomous navigation time is from 10 to 20 hours, depending on the type of battery installed. DCL is equipped with a sonar to detect and classify underwater objects. "This device has the intelligence to work independently and overcome any unexpected problems that it may encounter," says Meltzheim. The unit itself was developed in 2006-2009, but an automatic reception system was added for the Espadon program.
The data collected by the AUV DCL is transmitted back to the carrier ship, where the operators decide which objects should be more closely examined, then the second AUA is programmed and sent. "This uninhabited catamaran specifically designed for this project is very maneuverable, equipped with two propellers in the bow and two in the stern, four video cameras, lighting devices and a small sonar," explains Meltzheim. He is programmed to investigate all suspicious objects [min type] detected DCL and he examines them one by one, taking photos and video footage. He studies each object at least once, and after completing his mission, he returns to Sterenn Du. "


At this stage, the third AUV comes into play. Until recently, the project used reusable vehicles guided by wires to a mine, where they released a special explosive charge next to the mine and moved to a safe distance before the detonation of the mine-destroying charge. "However, there is currently a trend towards disposable and much cheaper robotskamikaze directed towards the mine by the operator," says Meltzheim.

After completion of the sea trials scheduled for the next few months, the next step will be the launch of the second prototype, which will be jointly funded by France and the UK under the Lancaster House contract of November 2010.

Another important development of the ANS that appeared on Euronaval also reflects the use of new and proven technologies in order to comply with the development of tactics of operations: a new and large version of the ANS Protector produced by the Israeli company Rafael. Work on the 11-meter vessel began about three years ago. After assessing the capabilities of small boats, the developers came to the conclusion that it was necessary to have a vessel that would be able to work for more excitement, as well as provide better speed and autonomy up to 48 hours. And in some conditions, and a large load.

Priority fell on a larger and more expensive ANS system designed for longer and longer hikes, equipped with dual (with 100% redundancy) diesel engines with jet propulsion, thus ensuring the absence of failures that prevent the operator from returning the vessel to the base. The redundancy also applies to the electrical and control systems, in addition, new, improved self-diagnostics of damage and survivability monitoring systems have been introduced.

The new vessel is based on a patented design optimized to work with unmanned systems with improved buoyancy and survivability. The durable and durable aluminum V-shaped hull with hermetic bulkheads is designed to improve seaworthiness and high survivability with high seas. A team of two people controls the sensors and navigates the tread. The ANS is equipped with radar and optoelectronic sensors and communication and data lines that can interact with a large number of systems used for maritime surveillance and border patrols.

The vessel's near field of view is limited by the mast height, Protector is an interceptor. After detecting a potential threat, Protector is sent to intercept the target and identify it with the help of the stabilized Toplite optical-electronic tower. Next, use the onboard speakerphone system to determine the intent of the target. As a non-lethal weapons hoses can be used, but Protector is also equipped with a Mini-Typhoon stabilized machine-gun system and, in addition, it can be equipped with a Spike missile combat module for precise destruction of targets at a long distance. To a certain extent, the Protector can also be used as a platform for electronic warfare.

The US Navy is interested in the ANS class of the new Protector to strengthen its ability to conduct a mine war. The fleet has been criticized for underestimating the importance of a mine war and is now trying to make up for lost time. However, the Navy wants a vessel that can quickly survey a large area for mine detection and clearance at any time, said Stanley DeGues, director of business development at Textron, AAI Advanced Systems, which develops common, unmanned surface ships (common, unmanned surface unmanned surface vessel, Cus-V).

"Only ships are able to do this at night," says Degués. Helicopters cannot do this. "

AAI offers Cus-V for naval Unmanned Influence Sweep System (UISS), designed to provide coastal warfare ships (Littoral Combat Ships, LCS) with remote, long voyage and semi-autonomous minesweeping capabilities with acoustic or magnetic detonators. The U.S. Navy plans to begin testing UISS platforms in fiscal year 2014 and hopes to put them into service in fiscal year 2016.

"For the price of just one minesweeper helicopter," says Degués. The fleet will be able to purchase 8-12 Cus-Vs. " Cus-Vs is 12 meters in length, the draft is slightly more than 0.6 meters and develops maximum speed in 28 nodes. It has a cruising range of approximately 1200 miles, is able to tow up to 2.5 tons at speeds in 10 nodes, has a four-meter bay, as well as a system of autonomous launch, towing and return of the trawl.
"Although the Cus-V was designed for use with LCS ships, it is also transportable by land, by air using C-17 and C-5 airplanes, and even by civilian ships," Degués says. Cus-V also can be launched from the deck of multi-purpose amphibious assault ships of the Navy, "he notes. There are also some global tasks for the ship, such as ensuring the safety of the harbors. Many foreign customers are very interested in this."

In the area of the ANPA, the Office of Naval Research (ONR) is actively promoting work on Large Unmanned Undersea Vehicle (LDUUV).
Currently, AUV in various shapes and sizes are in operation and under development, ranging from Littoral Battlespace Sensing Oceanographic Management to Knifefish minesweepers used with LCS ships, but all of them are mostly narrow-purpose apparatuses. It is planned that LDUUV will have a long range and duration of navigation and operational speed, autonomy and carrying capacity that allow autonomous, clandestine operations in advanced areas.
Although the US Navy has not yet specified what specific tasks will be assigned to the vehicle, the Navy command is currently analyzing alternatives (analysis of alternatives, AoA), which is scheduled to be completed by March 2013, some possibilities speak for themselves. The concealment and long range will be particularly useful for reconnaissance, observation and reconnaissance or preparation of the operational environment of future operations, such as mapping the depths of the seabed. But it is not difficult to imagine that LDUUV will be able to carry mines or miniature torpedoes, as well as perform tasks inherent in previously only inhabited submarines, such as tracking enemy submarines.

LDUUV is also uniquely suited for solving urgent tasks like protecting pipelines and telecommunication cables, which are of great importance for the global economy or attack enemy submarine anti-submarine sensors. Simply put, LDUUV will continuously perform the tasks of reconnaissance and preparation of combat operations, but also expand the capabilities of the US submarine fleet, fulfilling tasks impossible for the current arsenal. Moreover, they will arrive just in time to mitigate the effect of the write down of Los Angeles-class Cold War submarines during the 2020-s.

The new vehicles will differ significantly from their less fortunate predecessors, such as the autonomous multi-purpose underwater system (Mission Reconfigurable UUV, MR-UUV). Freed from the limitations of the 21-inch torpedo tube, they have more space for energy storage and payload. They are designed for use from various platforms: the SSGN and the Virginia submarines through their large-diameter torpedo tubes, coastal warships, piers, or even chartered merchant ships. With the development of MR-UUV, energy accumulation technologies have also evolved, allowing for greater energy density and longer voyage, although much remains to be done in this area in order to create an operatively useful apparatus. And, perhaps most importantly: their creation was supported by the highest level command of the Navy. In February, 2012, Chief of Naval Operations, Admiral Jonathan Greenert told reporters: "I would very much like to see a finished ocean uninhabited unit capable of operating for days like 30-45."
After completing an analysis of the LDUUV alternatives in the 2013 year, the US Navy will most likely publish a formal request for proposals in the 2014 th fiscal year, according to a statement from the sponsor of the LCS program. At the same time, the Office of Naval Research plans to produce 10 innovative marine prototypes, focusing on technology that allows for increased energy density, autonomy and reliability. After testing, these prototypes will be transferred to the fleet, the Navy hopes to have a squadron of 10 LDUUV workers to 2020-th year.
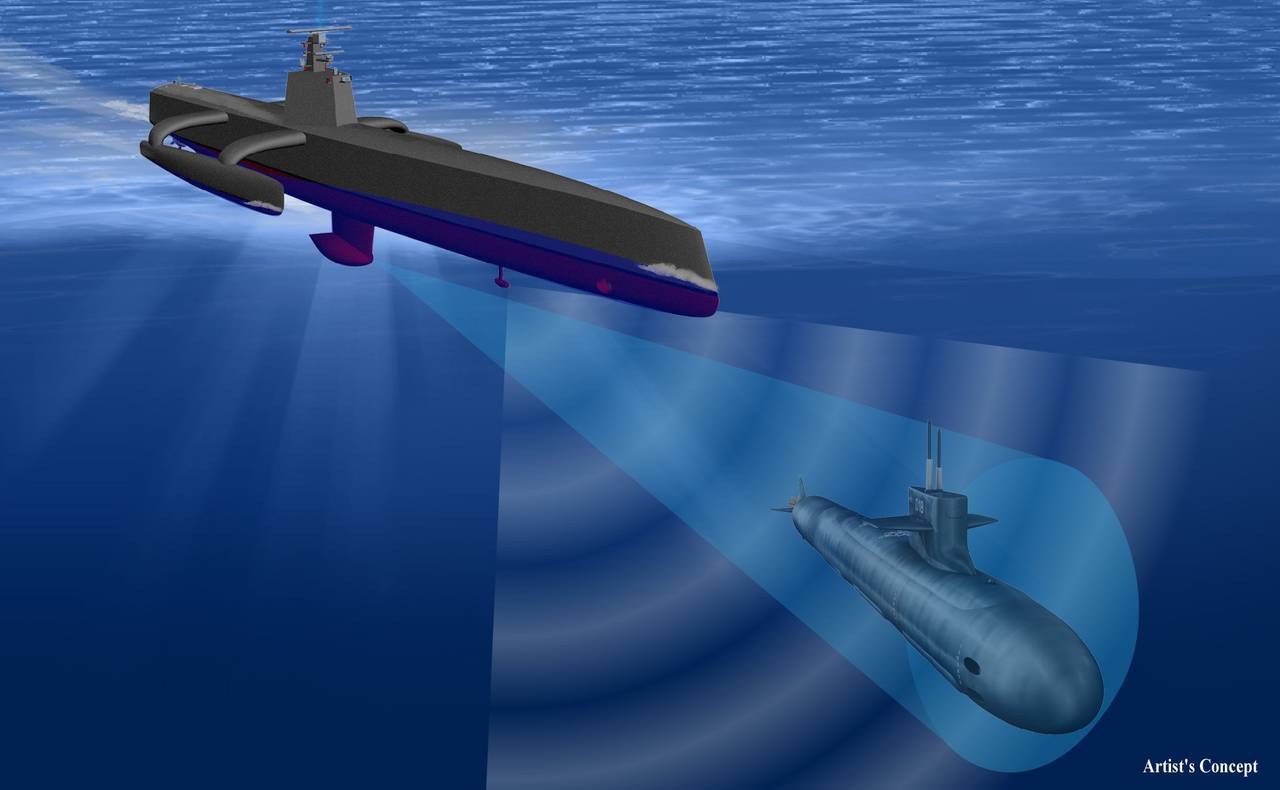
An even more ambitious project than LDUUV is the project of a desert vessel of the Agency for Advanced Defense Research Projects (Darpa), which will be covered by submarines during their patrols. Darpa recently chose Science Applications International to design and build a working prototype of an unmanned system designed to detect and track enemy submarines (Anti-Submarine Warfare Continuous Trail Unmanned Vessel, ACTIV). The goal is to demonstrate a non-secretive, autonomous vessel capable of openly tracking low-noise diesel-electric submarines for several months over thousands of kilometers and with minimal human factor involvement. Sea trials are scheduled for mid-year 2015.
ACTIV is a design, as they say, from a clean slate, with the goal of maximally effectively implementing the concept of a ship’s desert, deviating from the traditional requirements for warships such as buoyancy, dynamic stability and orientation. In addition to autonomy and reliability, the main goal of the program is to achieve “propulsive superiority” and demonstrate “disproportionate” speed, length of voyage, maneuverability and seaworthiness, in order to ensure the possibility of non-traditional tactics in response to target behavior.
ACTIV will not detect a submarine, but it will release the anti-submarine forces from the need of tracking the detected enemy submarine. It will use acoustic, optoelectronic, radar and lidar sensors to capture and subsequently accompany the underwater target during a storm and during periods of non-communication, while meeting international maritime standards, autonomously avoiding other surface ships. With a cruising range of 6200 km and an autonomy of 80 days, the vessel will be under "periodic remote control" from the coast via a horizon data line.
However, such advanced projects by Actuv and LDUUV are only at the development stage, and it will take years for them to be launched, let alone put them into service. In the meantime, Europe and Israel, apparently, have gone far ahead in terms of creating real autonomous marine systems.
Information