Slow but persistent exoskeleton treads
Half a century after the start of work in the field of exoskeletons, the first samples of this equipment are ready to go to full-fledged work. The company Lockheed Martin recently bragged that her project HULC (Human Universal Load Carrier - Universal handling system for carrying people) not only was conducted in conjunction with the Pentagon field trials, but is ready for serial production. The exoskeleton HULC is now "breathing in the back" at once several similar projects of other firms. But such an abundance of structures was not always.

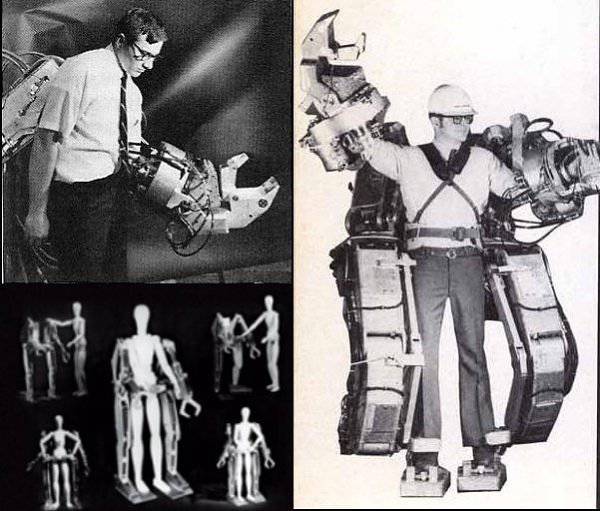
Actually the idea of creating any device that could be worn by a man and significantly improve his physical qualities appeared in the first half of the last century. However, until a certain time, it was just another notion of science fiction writers. The development of a practically applicable system was begun only at the very end of the fifties. The company General Electric, under the auspices of the US military, launched a project called Hardiman. The technical task was bold: the exoskeleton from GE was supposed to allow a person to operate with loads weighing up to one and a half thousand pounds (about 680 a kilogram). In case of successful completion of the project, the Exoskeleton Hardiman would have remarkable prospects. So, the military planned to use new equipment to facilitate the work of gunsmiths in the air force. In addition, "in line" were nuclear scientists, builders and representatives of the masses of other industries. But even ten years after the start of the program, General Electric engineers did not succeed in embodying all that was planned in metal. Several prototypes were built, including a working mechanical arm. The huge claws of the Hardymena had a hydraulic drive and could lift 750 pounds of cargo (approximately 340 kg). On the basis of one workable “glove” it was possible to create a second one. But the designers had another problem. The mechanical “legs” of the exoskeleton did not want to work correctly. The prototype Hardiman with one arm and two legs-supports weighed under 750 kilograms, while the maximum calculated carrying capacity was less than its own weight. Because of this weight and features of the centering of the exoskeleton when lifting the load, often the whole structure began to vibrate, which several times led to tilting. With bitter irony, the authors of the project called this phenomenon "the mechanical dance of St. Vitus." No matter how the designers of General Electric fought, they never managed to cope with the centering and vibrations. At the very beginning of the 70-x project Hardiman was closed.
In subsequent years, work in the direction of exoskeleton went inactive. From time to time they began to engage in various organizations, but almost always the proper result was not followed. At the same time, the purpose of creating an exoskeleton was not always its military use. In 70-ies, employees of the Massachusetts Technological University without much success developed equipment of a similar class, intended for the rehabilitation of disabled people with injuries of the musculoskeletal system. Unfortunately, then the problems of synchronization of various costume units were also in the way of engineers. It should be noted that the exoskeleton has a number of characteristic features that not a bit easier to create. Thus, a significant improvement in the physical capabilities of a human operator requires an appropriate source of energy. The latter, in turn, increases the size and weight of the entire apparatus. The second snag lies in the interaction of man and the exoskeleton. The principle of operation of such equipment is as follows: a person performs any movement with his hand or foot. Special sensors associated with his limbs, receive this signal and transmit the appropriate command to the actuators - hydraulic or electrical mechanisms. Simultaneously with the command, the same sensors ensure that the movement of the manipulators corresponds to the movements of the operator. In addition to the synchronization of the amplitudes of motion, engineers are faced with the question of temporary correspondence. The fact is that any mechanic has some reaction time. Therefore, it should be minimized in order to make the exoskeleton convenient enough. In the case of small compact exoskeletons, which are now being emphasized, the synchronization of human and machine movements has a special priority. Since the compact exoskeleton does not allow to increase the supporting surface, etc., mechanics that do not have time to move with the person may adversely affect the use. For example, the untimely movement of the mechanical “legs” can lead to the fact that a person simply loses his balance and falls. And this is not all the problems. Obviously, a person’s foot has fewer degrees of freedom than an arm, let alone a hand and fingers.
The newest story military exoskeletons began in 2000 year. Then the US agency DARPA initiated the beginning of the program EHPA (Exoskeletons for Human Performance Augmentation - Exoskeletons to increase human productivity). The EHPA program was part of a larger Land Warrior project that involved creating the image of a soldier of the future. However, in 2007, the Land Warrior was canceled, but its exoskeleton part was continued. The goal of the EHPA project was to create a so-called. complete exoskeleton, which had in its composition amplifiers for the hands and feet of a person. At the same time, no weapons or reservations were required. Responsible persons of DARPA and the Pentagon perfectly understood that the current state of affairs in the field of exoskeletons simply does not allow equipping them with additional functions. Therefore, the technical task of the EHPA program implies only the possibility of a long-term carrying by a soldier in the exoskeleton of cargo weighing about 100 kilograms and increasing its speed of movement.
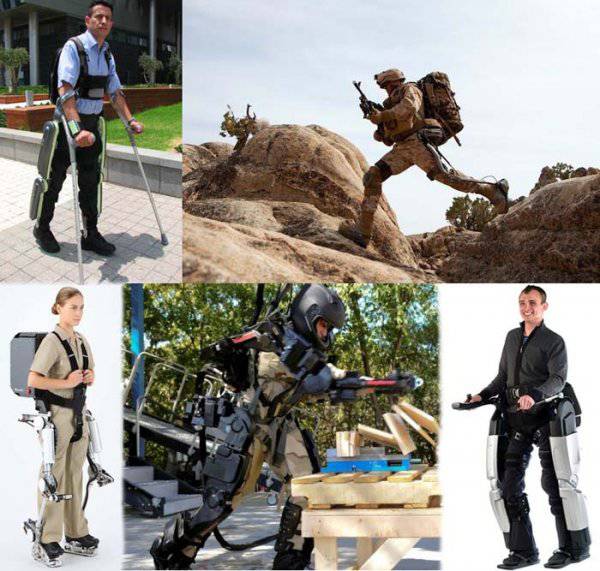
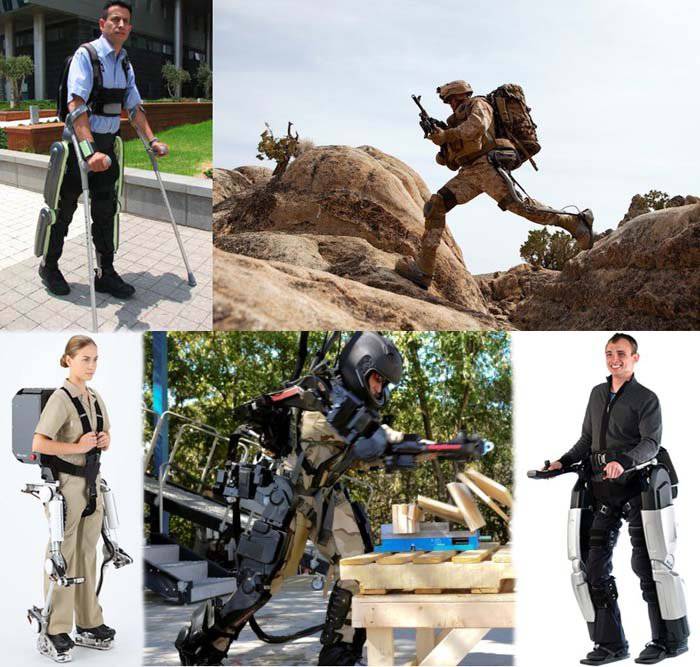
Sacros and the University of Berkeley (USA), as well as the Japanese Cyberdyne Systems, expressed their desire to participate in the development of new technology. Twelve years have passed since the program began, and during this time the list of participants has undergone some changes. To date, Sacros became part of the concern Raytheon, and a university department called Berkeley Bionics became a division of Lockheed Martin. Anyway, now there are three prototypes of exoskeletons created by the EHPA program: Lockheed Martin HULC, Cyberdyne HAL and Raytheon XOS.
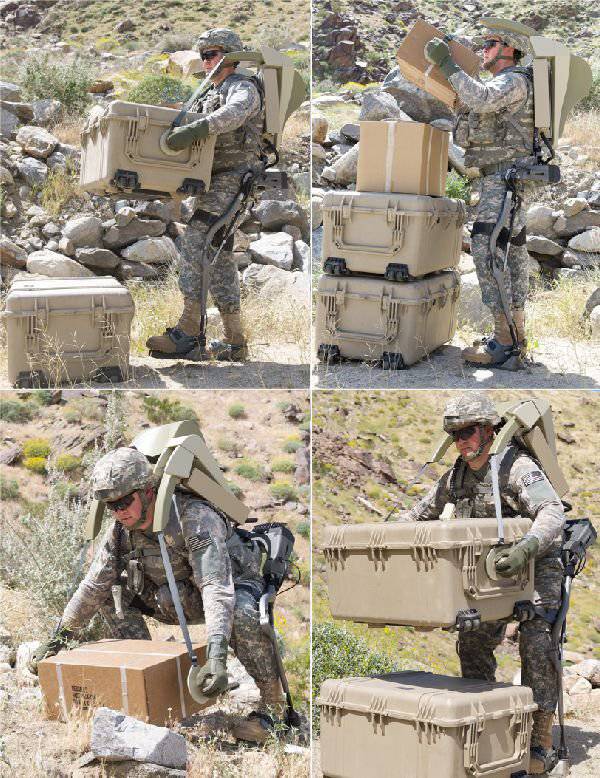
The first of these exoskeletons - HULC - does not fully meet the requirements of DARPA. The fact is that the 25-kilogram design incorporates only a back support system and mechanical “legs”. Hand support in HULC is not implemented. At the same time, the physical capabilities of the HULC operator are enhanced by the fact that through the back support system, most of the load on the hands is transferred to the power elements of the exoskeleton and eventually “goes” to the ground. Thanks to the applied system, soldiers can carry up to 90 kilograms of cargo and at the same time experience a load that meets all army standards. HULC is equipped with a lithium-ion battery, the capacity of which is enough to work for eight hours. In economy mode, a person in an exoskeleton can walk at a speed of 4-5 kilometers per hour. The maximum possible HULC speed is 17-18 km / h, however, this mode of operation of the system significantly reduces the operating time of a single battery charge. In the future, Lockheed Martin promises to equip HULC with fuel cells, the capacity of which will be enough for a day of work. In addition, in future versions, the designers promise to “robotize” hands, which will greatly enhance the user's ability of the exoskeleton.

The company Raytheon currently presented two to some extent similar exoskeleton with indexes XOS-1 and XOS-2. They differ in weight and size parameters and, as a result, in a number of practical characteristics. Unlike HULC, the XOS family is equipped with a hand unloading system. Both of these exoskeleton can lift a weight comparable to their own weight of about a kilogram of 80-90. It is noteworthy that the design of both XOS allows you to install various manipulators on the mechanical arms. It should be noted that XOS-1 and XOS-2 so far have significant power consumption. Because of this, they are not yet autonomous and require external power. Accordingly, the maximum speed of movement and battery life of speech is not yet. But, according to Raytheon, the need for power via cable will not be an obstacle to using XOSs in warehouses or military bases, where there is an appropriate source of electricity.

The third sample of the EHPA program is Cyberdyne HAL. To date, the actual version is HAL-5. This exoskeleton is to some extent a mixture of the first two. Like HULC, it has the ability to use it autonomously - there is enough battery life for an hour 2,5-3. With the XOS family, the development of Cyberdyne Systems combines the “fullness” of the design: it includes support systems for both arms and legs. However, the carrying capacity of the HAL-5 does not exceed a couple of tens of kilograms. Similarly, the situation with the speed qualities of this development. The fact is that the Japanese designers did not focus on military use, but on the rehabilitation of disabled people. Obviously, these users simply do not need high speed or capacity. Accordingly, if the HAL-5 in its present state is interested in the military, it will be possible to make on its basis a new exoskeleton, sharpened for military use.
Of all the variants of promising exoskeletons submitted to the EHPA competition, only HULC has reached the tests together with the military. A number of features of other projects still do not allow their field trials to begin. In September, several sets of HULC will be sent to the units in order to study the peculiarities of the work of the exoskeleton in real conditions. If everything goes smoothly, then high-volume production will begin in 2014-15.
Meanwhile, scientists and designers will have more advanced concepts and designs. The most anticipated innovation in the field of exoskeletons are robotic gloves. The existing manipulators are not yet very convenient for the use of tools and similar objects intended for manual use. Moreover, the creation of such gloves is associated with a number of difficulties. In general, they are similar to those of other exoskeleton aggregates, but in this case synchronization problems are aggravated by a large number of mechanical elements, features of the movement of the human hand, etc. The next stage in the development of exoskeletons will be the creation of a neuroelectronic interface. Now the movements of the mechanics are controlled by sensors and tracking drives. More convenient for engineers and scientists is the use of a control system with electrodes that remove human nerve impulses. Among other things, such a system will reduce the reaction time of mechanisms and, as a result, increase the efficiency of the entire exoskeleton.
As for the practical application, over the past half century, views on it have hardly changed. The main users of promising systems are still considered military. They can use exoskeletons for loading and unloading, preparing ammunition, and also, in a combat situation, to enhance the capabilities of fighters. It should be noted that the carrying capacity of exoskeletons will be useful not only to the military. The wide distribution of technology that allows a person to significantly increase their physical capabilities, can change the appearance of all logistics and freight. For example, the time to load a cargo semi-trailer in the absence of forklifts will decrease by tens of percent, which will increase the efficiency of the entire transportation system. Finally, exoskeletons controlled by nerve impulses will help disabled opornikami to live a full life again. Moreover, high hopes are placed on the neuroelectronic interface: with spinal injuries, etc. injuries signals from the brain may not reach a certain part of the body. If you “intercept” them to the damaged area of the nerve and send them to the control system of the exoskeleton, then the person will no longer be confined to a wheelchair or bed. Thus, military developments once again can improve the lives of not only the military. Only for now, building big plans, you should remember about the pilot operation of the Lockheed Martin HULC exoskeleton, which will only begin in the autumn. According to its results, it will be possible to judge both the prospects of the entire industry and the interest in it from potential users.
On the materials of the sites:
http://darpa.mil/
http://davidszondy.com/
http://lockheedmartin.com/
http://raytheon.com/
http://cyberdyne.jp/
http://rosbalt.ru/
Actually the idea of creating any device that could be worn by a man and significantly improve his physical qualities appeared in the first half of the last century. However, until a certain time, it was just another notion of science fiction writers. The development of a practically applicable system was begun only at the very end of the fifties. The company General Electric, under the auspices of the US military, launched a project called Hardiman. The technical task was bold: the exoskeleton from GE was supposed to allow a person to operate with loads weighing up to one and a half thousand pounds (about 680 a kilogram). In case of successful completion of the project, the Exoskeleton Hardiman would have remarkable prospects. So, the military planned to use new equipment to facilitate the work of gunsmiths in the air force. In addition, "in line" were nuclear scientists, builders and representatives of the masses of other industries. But even ten years after the start of the program, General Electric engineers did not succeed in embodying all that was planned in metal. Several prototypes were built, including a working mechanical arm. The huge claws of the Hardymena had a hydraulic drive and could lift 750 pounds of cargo (approximately 340 kg). On the basis of one workable “glove” it was possible to create a second one. But the designers had another problem. The mechanical “legs” of the exoskeleton did not want to work correctly. The prototype Hardiman with one arm and two legs-supports weighed under 750 kilograms, while the maximum calculated carrying capacity was less than its own weight. Because of this weight and features of the centering of the exoskeleton when lifting the load, often the whole structure began to vibrate, which several times led to tilting. With bitter irony, the authors of the project called this phenomenon "the mechanical dance of St. Vitus." No matter how the designers of General Electric fought, they never managed to cope with the centering and vibrations. At the very beginning of the 70-x project Hardiman was closed.
In subsequent years, work in the direction of exoskeleton went inactive. From time to time they began to engage in various organizations, but almost always the proper result was not followed. At the same time, the purpose of creating an exoskeleton was not always its military use. In 70-ies, employees of the Massachusetts Technological University without much success developed equipment of a similar class, intended for the rehabilitation of disabled people with injuries of the musculoskeletal system. Unfortunately, then the problems of synchronization of various costume units were also in the way of engineers. It should be noted that the exoskeleton has a number of characteristic features that not a bit easier to create. Thus, a significant improvement in the physical capabilities of a human operator requires an appropriate source of energy. The latter, in turn, increases the size and weight of the entire apparatus. The second snag lies in the interaction of man and the exoskeleton. The principle of operation of such equipment is as follows: a person performs any movement with his hand or foot. Special sensors associated with his limbs, receive this signal and transmit the appropriate command to the actuators - hydraulic or electrical mechanisms. Simultaneously with the command, the same sensors ensure that the movement of the manipulators corresponds to the movements of the operator. In addition to the synchronization of the amplitudes of motion, engineers are faced with the question of temporary correspondence. The fact is that any mechanic has some reaction time. Therefore, it should be minimized in order to make the exoskeleton convenient enough. In the case of small compact exoskeletons, which are now being emphasized, the synchronization of human and machine movements has a special priority. Since the compact exoskeleton does not allow to increase the supporting surface, etc., mechanics that do not have time to move with the person may adversely affect the use. For example, the untimely movement of the mechanical “legs” can lead to the fact that a person simply loses his balance and falls. And this is not all the problems. Obviously, a person’s foot has fewer degrees of freedom than an arm, let alone a hand and fingers.
The newest story military exoskeletons began in 2000 year. Then the US agency DARPA initiated the beginning of the program EHPA (Exoskeletons for Human Performance Augmentation - Exoskeletons to increase human productivity). The EHPA program was part of a larger Land Warrior project that involved creating the image of a soldier of the future. However, in 2007, the Land Warrior was canceled, but its exoskeleton part was continued. The goal of the EHPA project was to create a so-called. complete exoskeleton, which had in its composition amplifiers for the hands and feet of a person. At the same time, no weapons or reservations were required. Responsible persons of DARPA and the Pentagon perfectly understood that the current state of affairs in the field of exoskeletons simply does not allow equipping them with additional functions. Therefore, the technical task of the EHPA program implies only the possibility of a long-term carrying by a soldier in the exoskeleton of cargo weighing about 100 kilograms and increasing its speed of movement.
Sacros and the University of Berkeley (USA), as well as the Japanese Cyberdyne Systems, expressed their desire to participate in the development of new technology. Twelve years have passed since the program began, and during this time the list of participants has undergone some changes. To date, Sacros became part of the concern Raytheon, and a university department called Berkeley Bionics became a division of Lockheed Martin. Anyway, now there are three prototypes of exoskeletons created by the EHPA program: Lockheed Martin HULC, Cyberdyne HAL and Raytheon XOS.
The first of these exoskeletons - HULC - does not fully meet the requirements of DARPA. The fact is that the 25-kilogram design incorporates only a back support system and mechanical “legs”. Hand support in HULC is not implemented. At the same time, the physical capabilities of the HULC operator are enhanced by the fact that through the back support system, most of the load on the hands is transferred to the power elements of the exoskeleton and eventually “goes” to the ground. Thanks to the applied system, soldiers can carry up to 90 kilograms of cargo and at the same time experience a load that meets all army standards. HULC is equipped with a lithium-ion battery, the capacity of which is enough to work for eight hours. In economy mode, a person in an exoskeleton can walk at a speed of 4-5 kilometers per hour. The maximum possible HULC speed is 17-18 km / h, however, this mode of operation of the system significantly reduces the operating time of a single battery charge. In the future, Lockheed Martin promises to equip HULC with fuel cells, the capacity of which will be enough for a day of work. In addition, in future versions, the designers promise to “robotize” hands, which will greatly enhance the user's ability of the exoskeleton.
The company Raytheon currently presented two to some extent similar exoskeleton with indexes XOS-1 and XOS-2. They differ in weight and size parameters and, as a result, in a number of practical characteristics. Unlike HULC, the XOS family is equipped with a hand unloading system. Both of these exoskeleton can lift a weight comparable to their own weight of about a kilogram of 80-90. It is noteworthy that the design of both XOS allows you to install various manipulators on the mechanical arms. It should be noted that XOS-1 and XOS-2 so far have significant power consumption. Because of this, they are not yet autonomous and require external power. Accordingly, the maximum speed of movement and battery life of speech is not yet. But, according to Raytheon, the need for power via cable will not be an obstacle to using XOSs in warehouses or military bases, where there is an appropriate source of electricity.

The third sample of the EHPA program is Cyberdyne HAL. To date, the actual version is HAL-5. This exoskeleton is to some extent a mixture of the first two. Like HULC, it has the ability to use it autonomously - there is enough battery life for an hour 2,5-3. With the XOS family, the development of Cyberdyne Systems combines the “fullness” of the design: it includes support systems for both arms and legs. However, the carrying capacity of the HAL-5 does not exceed a couple of tens of kilograms. Similarly, the situation with the speed qualities of this development. The fact is that the Japanese designers did not focus on military use, but on the rehabilitation of disabled people. Obviously, these users simply do not need high speed or capacity. Accordingly, if the HAL-5 in its present state is interested in the military, it will be possible to make on its basis a new exoskeleton, sharpened for military use.
Of all the variants of promising exoskeletons submitted to the EHPA competition, only HULC has reached the tests together with the military. A number of features of other projects still do not allow their field trials to begin. In September, several sets of HULC will be sent to the units in order to study the peculiarities of the work of the exoskeleton in real conditions. If everything goes smoothly, then high-volume production will begin in 2014-15.
Meanwhile, scientists and designers will have more advanced concepts and designs. The most anticipated innovation in the field of exoskeletons are robotic gloves. The existing manipulators are not yet very convenient for the use of tools and similar objects intended for manual use. Moreover, the creation of such gloves is associated with a number of difficulties. In general, they are similar to those of other exoskeleton aggregates, but in this case synchronization problems are aggravated by a large number of mechanical elements, features of the movement of the human hand, etc. The next stage in the development of exoskeletons will be the creation of a neuroelectronic interface. Now the movements of the mechanics are controlled by sensors and tracking drives. More convenient for engineers and scientists is the use of a control system with electrodes that remove human nerve impulses. Among other things, such a system will reduce the reaction time of mechanisms and, as a result, increase the efficiency of the entire exoskeleton.
As for the practical application, over the past half century, views on it have hardly changed. The main users of promising systems are still considered military. They can use exoskeletons for loading and unloading, preparing ammunition, and also, in a combat situation, to enhance the capabilities of fighters. It should be noted that the carrying capacity of exoskeletons will be useful not only to the military. The wide distribution of technology that allows a person to significantly increase their physical capabilities, can change the appearance of all logistics and freight. For example, the time to load a cargo semi-trailer in the absence of forklifts will decrease by tens of percent, which will increase the efficiency of the entire transportation system. Finally, exoskeletons controlled by nerve impulses will help disabled opornikami to live a full life again. Moreover, high hopes are placed on the neuroelectronic interface: with spinal injuries, etc. injuries signals from the brain may not reach a certain part of the body. If you “intercept” them to the damaged area of the nerve and send them to the control system of the exoskeleton, then the person will no longer be confined to a wheelchair or bed. Thus, military developments once again can improve the lives of not only the military. Only for now, building big plans, you should remember about the pilot operation of the Lockheed Martin HULC exoskeleton, which will only begin in the autumn. According to its results, it will be possible to judge both the prospects of the entire industry and the interest in it from potential users.
On the materials of the sites:
http://darpa.mil/
http://davidszondy.com/
http://lockheedmartin.com/
http://raytheon.com/
http://cyberdyne.jp/
http://rosbalt.ru/
Information