Experienced snow and plowing vehicle PES-3 / ZIL-4904
Since 1966, the special design bureau of the plant. I.A. Likhachev dealt with the theme of all-terrain vehicles with the so-called. rotary screw propeller. The first experiments in this area, carried out using the original prototype, showed all the main features of an unusual chassis. Now you can begin to develop a full-size machine, suitable for use in real conditions. The new snow and swamp vehicle with auger chassis was named ZIL-4904 and PES-3.
The first machine-screw exit from SKB ZIL was a sample called ShN-67, which was later processed and renamed ShN-68. For several seasons, an experienced all-terrain vehicle was tested in different regions and conditions, ensuring the collection of a large amount of data on the operation of a non-standard propulsion unit. Soon a special stand was built at the Moscow plant, with the help of which it was supposed to work out different configurations of rotary-screw systems, without resorting to the restructuring of the existing prototype. The research work also produced the desired results, and it was possible to start developing a new all-terrain vehicle.

Snow and swamp-going vehicle ZIL-4904 / PEU-3 on a transport trailer. Photos of the State Military Technical Museum / gvtm.ru
In the late sixties, specialists of SKB ZIL, headed by V.A. Grachev continued work on the subject of search and evacuation facilities for the space industry. The astronautics required ultra-high-pass vehicles capable of reaching the most inaccessible areas and taking astronauts out of there with a descent vehicle. By this time, the PES-1 all-terrain vehicle was created and accepted for supply, but the work did not stop. At the beginning of the seventies, the development of two new projects started at once: the PED-2 all-terrain vehicle and the PEN-3 auger.
The evacuation technology presented special requirements in terms of maneuverability, and therefore, at a certain point, there was a proposal to build a machine with a rotary screw propeller. By analogy with the predecessors, this sample was designated as PES-3. He also had a factory designation ZIL-4904, revealing some features of the project. The numbers in this index indicated that the all-terrain vehicle belonged to the class of special vehicles with a full weight from 8 to 14 t. However, the names used did not reflect the most interesting features of the project.

All-terrain vehicle on the test, corresponding to the project PES-3A. Photo "Technique and weapons"
The design continued until the beginning of the 1972 of the year, after which the construction of the future PED-3 all-terrain vehicle started at the ZIL pilot plant. For a certain simplification of construction and subsequent operation, it was proposed to use already developed ideas and technologies. In addition, ready-made nodes were widely used. In particular, they used power units from serial chassis ZIL-135Л and other available products.
According to the experience of previous projects, the car was built on the basis of a frame welded from metal profiles. On the frame was mounted plating, made of steel and fiberglass. The entire lower hermetic displacement part of the body received a metal lining. Plastic was used only as part of the upper body units. The lower steel part of the body had a rather complex shape formed by several intersecting planes. It received a polygonal cross-section with a central unit, on the sides of which the propulsion rotors were to be located. The upper units of the metal hull formed a large deck platform.
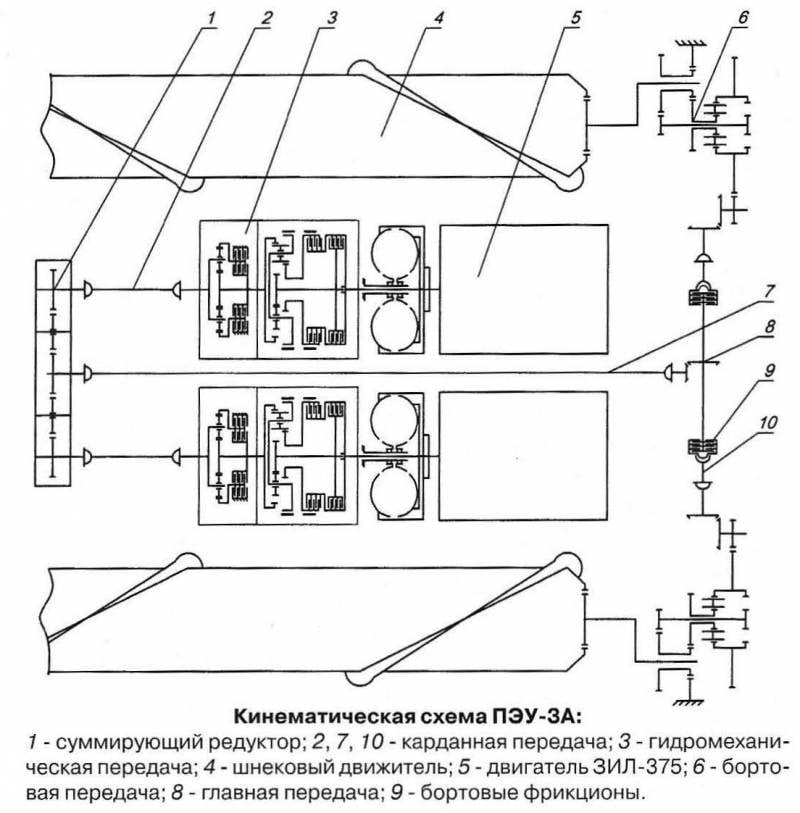
The power plant and transmission of the project PES-3A. Drawing "Technique and weapons"
In front of the car was a large fiberglass crew cabin. Immediately after it, a large cargo area was provided, suitable for accommodating a payload or an additional module, such as a passenger cabin. All load should be placed only on the site. The internal volume of the body was given only for the power plant and transmission devices. Some other units were also present, such as fuel tanks with a total capacity of 1200 l.
In the rear part of the hull, below the roof-deck, two gasoline engines ZIL-385 hp each with 180 power were placed forward with flywheels. Before them were automatic hydromechanical transmission. Such power units in the form of an engine and transmission were borrowed from the ZIL-135L serial car without any special modifications. Before the gears there was a summing gearbox connected with them using a pair of cardan shafts. The five-shaft gearbox with the reverse function gave power to the longitudinal drive shaft between the engines. In the stern of the car were the main gear, a pair of dry-friction side clutches and band brakes.
The onboard transmissions provided torque output to the bushings of the chassis rotors. The latter were located in the rear part of the hull and with the help of the racks were carried out at a certain distance from the hull sides. Drive propulsion was carried out only behind.

Shnekohod on the water. Photo Tehnorussia.ru
According to the results of research with the help of a special stand, the optimal shape of the rotor-screw propulsion was formed. The PES-3 all-terrain vehicle was planned to be equipped with a pair of rotors-screws 5,99 m long with a diameter of the main cylinder 1,2 m. The cylindrical body and the tapered ends of the screw were made of AMg-6 alloy. Spiral lugs of a triangular cross section with a height of 150 mm were fixed on the outer surface of the body. On the cylinder there were three spirals with the installation angle 34 °.
The front end of the auger was fixed on a fixed base under the cockpit. To facilitate movement over rough terrain, such a mount was covered with an inclined shield-ski. Rear supports with shafts and transmission gearboxes placed in the stern open.
The all-terrain vehicle was equipped with a three-seat cabin with a large glass area. Access to crew jobs was provided by a pair of side doors. The relatively high height of the car and the absence of any steps to a certain extent made it difficult to land. However, in this respect, the ZIL-4904 screw auger differed little from other similar-purpose equipment.

Tests on the water, the view of the stern. Photo "Technique and weapons"
At the driver’s post there was a dashboard with a set of dial gauges, buttons and toggle switches. The operation of engines, hydromechanical gears and transmissions was controlled using a set of levers and pedals that resembled the equipment of a conventional tracked vehicle.
The base chassis of ultra-high terrain with an unusual propulsion differed in sufficiently large size. The length of the PEU-3 reached 8275 mm, width - 3,2 m. The height of the cab roof - 3 m. On a solid surface, the ground clearance reached record 1,1 m. The front overhang angle was 30 °, the rear - 70 °. The curb weight was set at 7 tons. Together with the payload up to 2,5, the gross weight of the car slightly exceeded 10,1 tons. According to calculations, on snow or mud the auger could reach speeds up to 15-17 km / h. The maximum speed on the water was determined in 8-10 km / h.

ZIL-4904 after the restructuring of the project PES-3B. Photo Tehnorussia.ru
During tests of the mock-up model SN-67 / 68, it was found that the rotor propeller cannot be used on hard surfaces. On the asphalt or concrete, metal lugs, assuming the full mass of the car, quickly wore out and lost their characteristics. In this regard, in the framework of the new project ZIL-4904, a special conveyor was developed for all-terrain vehicle transportation on highways.
It was proposed to transport the PES-3 car on a special trailer of sufficient dimensions. Before the platform of the required dimensions, an axle with two wheels fitted with “all-terrain” tires was installed on the trailer. Behind the platform, a two-axle bogie with similar wheels was placed. The trailer in conjunction with the truck ZIL-130 could ensure the delivery of a prototype to the test site. Despite its exclusively supporting role, the special trailer made a significant contribution to the testing and the project as a whole.
According to the operating experience of existing search and evacuation facilities, it was proposed to create two main modifications of the promising all-terrain vehicle. Thus, the machine called PES-3А was intended for the transport of rescuers, astronauts and some cargo or equipment. The lander, in turn, had to be taken out on the lodgement of the PES-3B all-terrain vehicle. There was also a proposal to equip both cars with a rigid coupling, due to which they could be connected to a system with additionally enhanced cross-country performance.
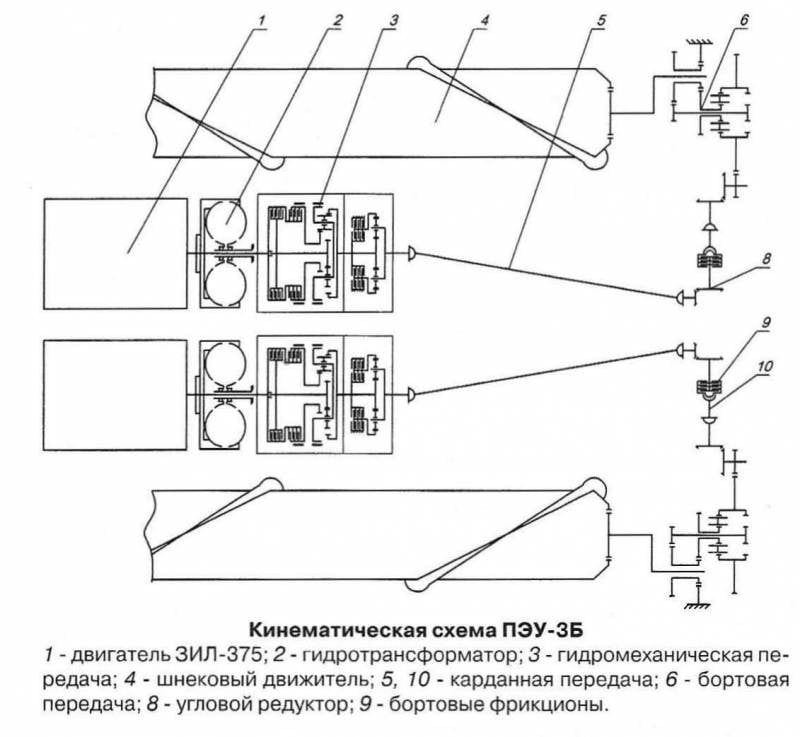
The transmission scheme from the project PES-3B. Drawing "Technique and weapons"
At the beginning of 1972 of the year, completing the design work, SKB ZIL launched the assembly of an experienced auger. The car was built under the project PES-3А and was supposed to carry the passenger compartment. Behind the cockpit installed fiberglass cabin, rising above it almost half a meter. Salon occupied about half the length of the hull. Behind the cabin an additional boxed casing was provided with volumes for transporting equipment and property. Passenger cabin had several windows in the front wall and sides. Landing was carried out through the rear hatch of small sizes. Inside the cabin were four places for passengers. There were also lockers and other volumes for a variety of rescue and medical equipment.
30 April 1972, the Plant. Likhachev completed the construction of a prototype machine in the PES-3А version. Until mid-May, the assembly of a special trailer continued, and only after its appearance the rover could be sent for testing. The first checks were carried out on the water. The reservoirs of the Nara fish factory became a platform for testing. About two o'clock the auger sailed at high speed, after which the main transmission overheated. Having disassembled it, experts found out that several parts had collapsed due to a lack of lubrication. It took repair and refinement of lubricant supply.

Transportation of PES-3B on a special trailer. Photo "Technique and weapons"
In June, a new phase of testing began, during which ZIL-4904, among other things, was compared with other samples of special equipment. The maximum speed of the all-terrain vehicle on the water exceeded 10 km / h. With a load of 2,5, it accelerated to 9,25 km / h. In the swamp, the speed without load and with load was 7,25 and 7,1 km / h, respectively. Once again it was confirmed that the PEU-3 and SHN-68 augers can move along so-called. rafting, whereas for tracked vehicles, it turns out to be insurmountable.
At the same time, it was found that in certain conditions the rotary screw propeller shows insufficient maneuverability on soft surfaces. So, on floating vegetation, he, reacting weakly to the driver’s commands, showed a tendency to turn towards the least resistance. In some cases, this feature of the machine made it difficult to maneuver immediately after landing.
By the beginning of autumn 1972, SKB ZIL completed tests of an unusual machine and was engaged in finalizing the existing project, taking into account the accumulated experience. Tests have shown that the existing transmission design is extremely complex and needs to be improved. Also required some changes to the power plant and control systems. Finally, in the course of future restructuring, the ZIL-4904 all-terrain vehicle was proposed to be converted into a freight version of the PES-3B.

PES-3B auger (in the background) on joint tests. Photo "Technique and weapons"
Power units in the form of engines and hydromechanical gears turned backwards. Summing gear removed. Now from the GMP pushed the shaft shafts, connected with its own onboard gears. In the new version of the project, each engine was connected only with its own rotor-screw. As a consequence, the government had to change. The engine control pedals disappeared from the cab, instead of which the existing levers should now be used. Each of the two levers of the driver connected to the throttle of the engine and the friction of its side. Giving the lever forward increased engine speed. Pulling the lever on itself, the driver reduced speed and slowed down the auger.
Instead, the existing passenger compartment on the body mounted a simple flatbed body with the ability to install an awning. In the future, the PED-3B cargo all-terrain vehicle was to receive a hydraulic crane and a cradle to accommodate the spacecraft. As far as is known, such equipment was absent on the prototype. Probably, it could be installed later, before the next stage of testing.
For several reasons, the process of finalizing an existing project was noticeably delayed. It was possible to resume testing only in the middle of January, 1978, a few years after the completion of the checks of the “baseline” PES-3A. The testing grounds for the Nara plant again became the testing ground. Before the start of winter, ponds were drained from the ponds, and a little later they were filled with snow. Thus, the trail for the all-terrain vehicle was a peat pad with loose snow to a depth of 550 mm.

Shnekohod after sending to the museum. Photo Kolesa.ru
During the tests, the all-terrain vehicle moved along the snow cover, and also climbed the dams between the ponds and descended from them. The movement was carried out in a straight line, with turns and sideways. It was shown that the new transmission provides rotation with a different radius, up to the minimum. In some cases, however, an external auger slipped. There were no such problems when cornering with a large radius. While driving through the snow, the rotors of the PES-3B all-terrain vehicle were buried by about 500 mm. If the snow cover was thicker than half a meter, there were no problems. Movement over less thick snow with a relatively hard ground beneath it led to some abrasion of the lugs.
Perspective PES-3B was tested in conjunction with other equipment that has other variants of the chassis. Depending on the characteristics of the route, the auger could show advantages over the “competitors”, demonstrate similar results or lose to them. So, in the mud or shallow snow, the best speed indicators were shown by the tracked conveyor GAZ-71, but in the swamp or raft the undoubted leader was ZIL-4904. It is curious that in all cases the auger-driven snow and swamp-going vehicle showed the greatest fuel consumption - up to 80 l / h.
Special machine PES-3 has been tested in two configurations and has shown its capabilities in a variety of conditions in solving various problems. A large amount of data was collected, which allowed to analyze and make a final decision on the further fate of an interesting development. The authors of the project and representatives of the air force, who in the future might have to operate such equipment, decided to abandon the further development of the existing project.

Left auger, front view. Photo Kolesa.ru
Indeed, the ZIL-4904 showed the highest mobility and terrain characteristics in the most difficult terrain and left all competitors far behind. He could get to remote areas and take astronauts out of places where other all-terrain vehicles could not reach. However, the car had characteristic flaws that hampered its use as a search and evacuation unit.
The all-terrain vehicle PEU-3 had a length of more than 8 m and a width of more than 3 m, and also weighed almost 7 tons. For its transportation on public roads, a special trailer was required, and transportation by air or helicopters was military transport aviation excluded due to excessive dimensions. Thus, the search and rescue service of the Air Force, using existing and promising models of equipment, could not in the shortest possible time deliver the all-terrain vehicle to the place of work. Existing machines of the PEU-1 family, unlike the screw conveyor, had sufficient mobility and therefore could not give way to the new PEU-3. It should be noted that similar problems a few years before faced wheeled all-terrain vehicle PEU-2. He could carry rescuers with astronauts, and a descent vehicle, but he was too large and heavy to transport by air.
According to the results of tests of the PES-3 snow and swamp vehicle, the customer and the developer made several main conclusions. They recognized that such a technique really has great prospects and may be of interest in the context of exploration. At the same time, it was found that a new model of this kind - if it will be developed - should be created taking into account the capabilities of military transport aviation.

Car on a trailer, rear view. Photo Kolesa.ru
Soon after the completion of the test ZIL-4904, it was decided to create a new all-terrain vehicle with a rotary screw propeller that meets the new requirements. The result of the new works in a few years was the ZIL-2906 and ZIL-29061 machines. This technique, having passed all the required checks, was accepted for supply as part of the PEC-490 search and evacuation complex. Due to its small size and weight, the new screw auger could be transported not only by airplanes or helicopters, but also by a wheel-powered all-terrain vehicle ZIL-4906 with a crane and a cradle. To the place of work ZIL-2906 had to get exactly on the site of a cargo all-terrain vehicle.
The decision to abandon the ZIL-4904 / PES-3 all-terrain vehicle was made at the end of the 1978 year. An interesting, but unpromising car, along with a special transport trailer, was returned to Moscow to the factory. For years she stood idle, and then went to the museum. Currently, the auger in the configuration of the truck is located in the State Military Technical Museum (v. Ivanovskoe, Moscow region), where it is shown along with a number of other developments of the ZIL design bureau.
The POR-3 auger-driven snow and swamp vehicle was created taking into account future practical application in two roles at once. Tests have shown that this machine is capable of solving the assigned tasks, but at the same time it has a number of characteristic problems that prevent full-scale work. It was proposed to correct the identified deficiencies in the framework of the new project. Taking into account the accumulated experience, all-terrain vehicles ZIL-2906 and ZIL-29061 were created. They entered the service and still remain in operation, ensuring the timely evacuation of the landed astronauts.
Based on:
http://gvtm.ru/
http://denisovets.ru/
http://kolesa.ru/
https://popmech.ru/
R. Danilov Pne-3 auger snow and swamp vehicle. // Technique and weapons, 2010. No.11.
The first machine-screw exit from SKB ZIL was a sample called ShN-67, which was later processed and renamed ShN-68. For several seasons, an experienced all-terrain vehicle was tested in different regions and conditions, ensuring the collection of a large amount of data on the operation of a non-standard propulsion unit. Soon a special stand was built at the Moscow plant, with the help of which it was supposed to work out different configurations of rotary-screw systems, without resorting to the restructuring of the existing prototype. The research work also produced the desired results, and it was possible to start developing a new all-terrain vehicle.

Snow and swamp-going vehicle ZIL-4904 / PEU-3 on a transport trailer. Photos of the State Military Technical Museum / gvtm.ru
In the late sixties, specialists of SKB ZIL, headed by V.A. Grachev continued work on the subject of search and evacuation facilities for the space industry. The astronautics required ultra-high-pass vehicles capable of reaching the most inaccessible areas and taking astronauts out of there with a descent vehicle. By this time, the PES-1 all-terrain vehicle was created and accepted for supply, but the work did not stop. At the beginning of the seventies, the development of two new projects started at once: the PED-2 all-terrain vehicle and the PEN-3 auger.
The evacuation technology presented special requirements in terms of maneuverability, and therefore, at a certain point, there was a proposal to build a machine with a rotary screw propeller. By analogy with the predecessors, this sample was designated as PES-3. He also had a factory designation ZIL-4904, revealing some features of the project. The numbers in this index indicated that the all-terrain vehicle belonged to the class of special vehicles with a full weight from 8 to 14 t. However, the names used did not reflect the most interesting features of the project.

All-terrain vehicle on the test, corresponding to the project PES-3A. Photo "Technique and weapons"
The design continued until the beginning of the 1972 of the year, after which the construction of the future PED-3 all-terrain vehicle started at the ZIL pilot plant. For a certain simplification of construction and subsequent operation, it was proposed to use already developed ideas and technologies. In addition, ready-made nodes were widely used. In particular, they used power units from serial chassis ZIL-135Л and other available products.
According to the experience of previous projects, the car was built on the basis of a frame welded from metal profiles. On the frame was mounted plating, made of steel and fiberglass. The entire lower hermetic displacement part of the body received a metal lining. Plastic was used only as part of the upper body units. The lower steel part of the body had a rather complex shape formed by several intersecting planes. It received a polygonal cross-section with a central unit, on the sides of which the propulsion rotors were to be located. The upper units of the metal hull formed a large deck platform.
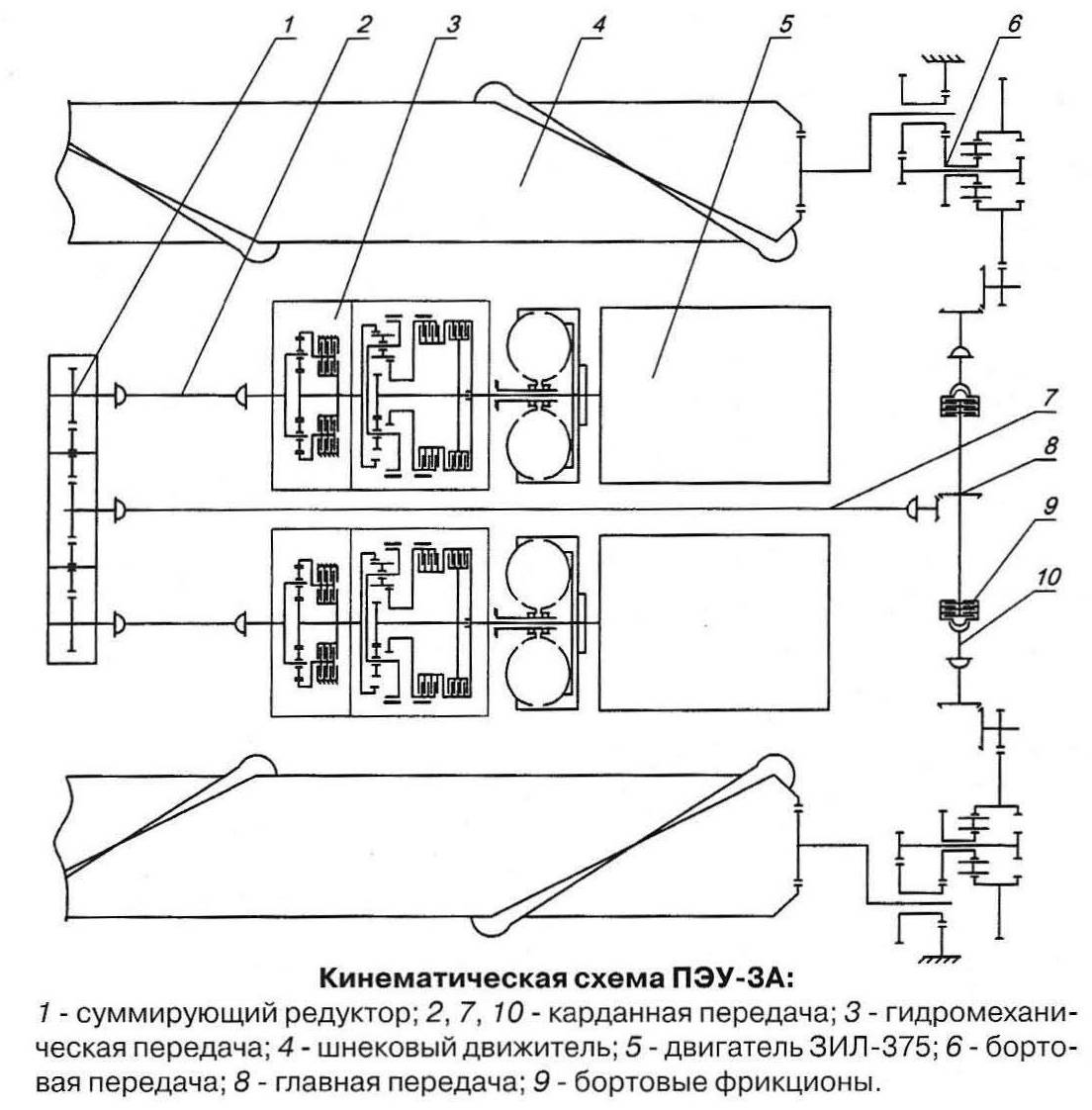
The power plant and transmission of the project PES-3A. Drawing "Technique and weapons"
In front of the car was a large fiberglass crew cabin. Immediately after it, a large cargo area was provided, suitable for accommodating a payload or an additional module, such as a passenger cabin. All load should be placed only on the site. The internal volume of the body was given only for the power plant and transmission devices. Some other units were also present, such as fuel tanks with a total capacity of 1200 l.
In the rear part of the hull, below the roof-deck, two gasoline engines ZIL-385 hp each with 180 power were placed forward with flywheels. Before them were automatic hydromechanical transmission. Such power units in the form of an engine and transmission were borrowed from the ZIL-135L serial car without any special modifications. Before the gears there was a summing gearbox connected with them using a pair of cardan shafts. The five-shaft gearbox with the reverse function gave power to the longitudinal drive shaft between the engines. In the stern of the car were the main gear, a pair of dry-friction side clutches and band brakes.
The onboard transmissions provided torque output to the bushings of the chassis rotors. The latter were located in the rear part of the hull and with the help of the racks were carried out at a certain distance from the hull sides. Drive propulsion was carried out only behind.

Shnekohod on the water. Photo Tehnorussia.ru
According to the results of research with the help of a special stand, the optimal shape of the rotor-screw propulsion was formed. The PES-3 all-terrain vehicle was planned to be equipped with a pair of rotors-screws 5,99 m long with a diameter of the main cylinder 1,2 m. The cylindrical body and the tapered ends of the screw were made of AMg-6 alloy. Spiral lugs of a triangular cross section with a height of 150 mm were fixed on the outer surface of the body. On the cylinder there were three spirals with the installation angle 34 °.
The front end of the auger was fixed on a fixed base under the cockpit. To facilitate movement over rough terrain, such a mount was covered with an inclined shield-ski. Rear supports with shafts and transmission gearboxes placed in the stern open.
The all-terrain vehicle was equipped with a three-seat cabin with a large glass area. Access to crew jobs was provided by a pair of side doors. The relatively high height of the car and the absence of any steps to a certain extent made it difficult to land. However, in this respect, the ZIL-4904 screw auger differed little from other similar-purpose equipment.

Tests on the water, the view of the stern. Photo "Technique and weapons"
At the driver’s post there was a dashboard with a set of dial gauges, buttons and toggle switches. The operation of engines, hydromechanical gears and transmissions was controlled using a set of levers and pedals that resembled the equipment of a conventional tracked vehicle.
The base chassis of ultra-high terrain with an unusual propulsion differed in sufficiently large size. The length of the PEU-3 reached 8275 mm, width - 3,2 m. The height of the cab roof - 3 m. On a solid surface, the ground clearance reached record 1,1 m. The front overhang angle was 30 °, the rear - 70 °. The curb weight was set at 7 tons. Together with the payload up to 2,5, the gross weight of the car slightly exceeded 10,1 tons. According to calculations, on snow or mud the auger could reach speeds up to 15-17 km / h. The maximum speed on the water was determined in 8-10 km / h.

ZIL-4904 after the restructuring of the project PES-3B. Photo Tehnorussia.ru
During tests of the mock-up model SN-67 / 68, it was found that the rotor propeller cannot be used on hard surfaces. On the asphalt or concrete, metal lugs, assuming the full mass of the car, quickly wore out and lost their characteristics. In this regard, in the framework of the new project ZIL-4904, a special conveyor was developed for all-terrain vehicle transportation on highways.
It was proposed to transport the PES-3 car on a special trailer of sufficient dimensions. Before the platform of the required dimensions, an axle with two wheels fitted with “all-terrain” tires was installed on the trailer. Behind the platform, a two-axle bogie with similar wheels was placed. The trailer in conjunction with the truck ZIL-130 could ensure the delivery of a prototype to the test site. Despite its exclusively supporting role, the special trailer made a significant contribution to the testing and the project as a whole.
According to the operating experience of existing search and evacuation facilities, it was proposed to create two main modifications of the promising all-terrain vehicle. Thus, the machine called PES-3А was intended for the transport of rescuers, astronauts and some cargo or equipment. The lander, in turn, had to be taken out on the lodgement of the PES-3B all-terrain vehicle. There was also a proposal to equip both cars with a rigid coupling, due to which they could be connected to a system with additionally enhanced cross-country performance.
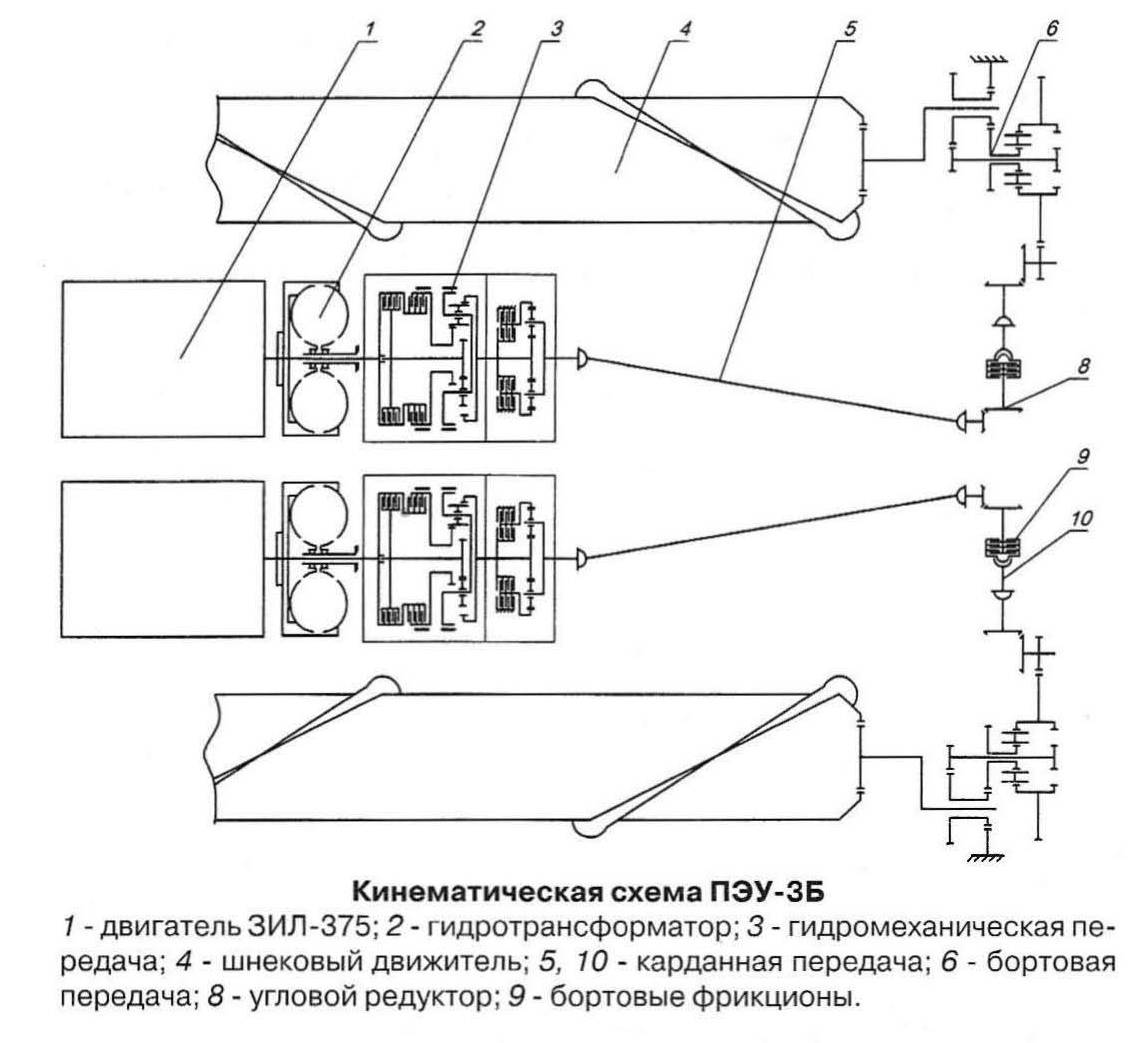
The transmission scheme from the project PES-3B. Drawing "Technique and weapons"
At the beginning of 1972 of the year, completing the design work, SKB ZIL launched the assembly of an experienced auger. The car was built under the project PES-3А and was supposed to carry the passenger compartment. Behind the cockpit installed fiberglass cabin, rising above it almost half a meter. Salon occupied about half the length of the hull. Behind the cabin an additional boxed casing was provided with volumes for transporting equipment and property. Passenger cabin had several windows in the front wall and sides. Landing was carried out through the rear hatch of small sizes. Inside the cabin were four places for passengers. There were also lockers and other volumes for a variety of rescue and medical equipment.
30 April 1972, the Plant. Likhachev completed the construction of a prototype machine in the PES-3А version. Until mid-May, the assembly of a special trailer continued, and only after its appearance the rover could be sent for testing. The first checks were carried out on the water. The reservoirs of the Nara fish factory became a platform for testing. About two o'clock the auger sailed at high speed, after which the main transmission overheated. Having disassembled it, experts found out that several parts had collapsed due to a lack of lubrication. It took repair and refinement of lubricant supply.

Transportation of PES-3B on a special trailer. Photo "Technique and weapons"
In June, a new phase of testing began, during which ZIL-4904, among other things, was compared with other samples of special equipment. The maximum speed of the all-terrain vehicle on the water exceeded 10 km / h. With a load of 2,5, it accelerated to 9,25 km / h. In the swamp, the speed without load and with load was 7,25 and 7,1 km / h, respectively. Once again it was confirmed that the PEU-3 and SHN-68 augers can move along so-called. rafting, whereas for tracked vehicles, it turns out to be insurmountable.
At the same time, it was found that in certain conditions the rotary screw propeller shows insufficient maneuverability on soft surfaces. So, on floating vegetation, he, reacting weakly to the driver’s commands, showed a tendency to turn towards the least resistance. In some cases, this feature of the machine made it difficult to maneuver immediately after landing.
By the beginning of autumn 1972, SKB ZIL completed tests of an unusual machine and was engaged in finalizing the existing project, taking into account the accumulated experience. Tests have shown that the existing transmission design is extremely complex and needs to be improved. Also required some changes to the power plant and control systems. Finally, in the course of future restructuring, the ZIL-4904 all-terrain vehicle was proposed to be converted into a freight version of the PES-3B.

PES-3B auger (in the background) on joint tests. Photo "Technique and weapons"
Power units in the form of engines and hydromechanical gears turned backwards. Summing gear removed. Now from the GMP pushed the shaft shafts, connected with its own onboard gears. In the new version of the project, each engine was connected only with its own rotor-screw. As a consequence, the government had to change. The engine control pedals disappeared from the cab, instead of which the existing levers should now be used. Each of the two levers of the driver connected to the throttle of the engine and the friction of its side. Giving the lever forward increased engine speed. Pulling the lever on itself, the driver reduced speed and slowed down the auger.
Instead, the existing passenger compartment on the body mounted a simple flatbed body with the ability to install an awning. In the future, the PED-3B cargo all-terrain vehicle was to receive a hydraulic crane and a cradle to accommodate the spacecraft. As far as is known, such equipment was absent on the prototype. Probably, it could be installed later, before the next stage of testing.
For several reasons, the process of finalizing an existing project was noticeably delayed. It was possible to resume testing only in the middle of January, 1978, a few years after the completion of the checks of the “baseline” PES-3A. The testing grounds for the Nara plant again became the testing ground. Before the start of winter, ponds were drained from the ponds, and a little later they were filled with snow. Thus, the trail for the all-terrain vehicle was a peat pad with loose snow to a depth of 550 mm.

Shnekohod after sending to the museum. Photo Kolesa.ru
During the tests, the all-terrain vehicle moved along the snow cover, and also climbed the dams between the ponds and descended from them. The movement was carried out in a straight line, with turns and sideways. It was shown that the new transmission provides rotation with a different radius, up to the minimum. In some cases, however, an external auger slipped. There were no such problems when cornering with a large radius. While driving through the snow, the rotors of the PES-3B all-terrain vehicle were buried by about 500 mm. If the snow cover was thicker than half a meter, there were no problems. Movement over less thick snow with a relatively hard ground beneath it led to some abrasion of the lugs.
Perspective PES-3B was tested in conjunction with other equipment that has other variants of the chassis. Depending on the characteristics of the route, the auger could show advantages over the “competitors”, demonstrate similar results or lose to them. So, in the mud or shallow snow, the best speed indicators were shown by the tracked conveyor GAZ-71, but in the swamp or raft the undoubted leader was ZIL-4904. It is curious that in all cases the auger-driven snow and swamp-going vehicle showed the greatest fuel consumption - up to 80 l / h.
Special machine PES-3 has been tested in two configurations and has shown its capabilities in a variety of conditions in solving various problems. A large amount of data was collected, which allowed to analyze and make a final decision on the further fate of an interesting development. The authors of the project and representatives of the air force, who in the future might have to operate such equipment, decided to abandon the further development of the existing project.

Left auger, front view. Photo Kolesa.ru
Indeed, the ZIL-4904 showed the highest mobility and terrain characteristics in the most difficult terrain and left all competitors far behind. He could get to remote areas and take astronauts out of places where other all-terrain vehicles could not reach. However, the car had characteristic flaws that hampered its use as a search and evacuation unit.
The all-terrain vehicle PEU-3 had a length of more than 8 m and a width of more than 3 m, and also weighed almost 7 tons. For its transportation on public roads, a special trailer was required, and transportation by air or helicopters was military transport aviation excluded due to excessive dimensions. Thus, the search and rescue service of the Air Force, using existing and promising models of equipment, could not in the shortest possible time deliver the all-terrain vehicle to the place of work. Existing machines of the PEU-1 family, unlike the screw conveyor, had sufficient mobility and therefore could not give way to the new PEU-3. It should be noted that similar problems a few years before faced wheeled all-terrain vehicle PEU-2. He could carry rescuers with astronauts, and a descent vehicle, but he was too large and heavy to transport by air.
According to the results of tests of the PES-3 snow and swamp vehicle, the customer and the developer made several main conclusions. They recognized that such a technique really has great prospects and may be of interest in the context of exploration. At the same time, it was found that a new model of this kind - if it will be developed - should be created taking into account the capabilities of military transport aviation.

Car on a trailer, rear view. Photo Kolesa.ru
Soon after the completion of the test ZIL-4904, it was decided to create a new all-terrain vehicle with a rotary screw propeller that meets the new requirements. The result of the new works in a few years was the ZIL-2906 and ZIL-29061 machines. This technique, having passed all the required checks, was accepted for supply as part of the PEC-490 search and evacuation complex. Due to its small size and weight, the new screw auger could be transported not only by airplanes or helicopters, but also by a wheel-powered all-terrain vehicle ZIL-4906 with a crane and a cradle. To the place of work ZIL-2906 had to get exactly on the site of a cargo all-terrain vehicle.
The decision to abandon the ZIL-4904 / PES-3 all-terrain vehicle was made at the end of the 1978 year. An interesting, but unpromising car, along with a special transport trailer, was returned to Moscow to the factory. For years she stood idle, and then went to the museum. Currently, the auger in the configuration of the truck is located in the State Military Technical Museum (v. Ivanovskoe, Moscow region), where it is shown along with a number of other developments of the ZIL design bureau.
The POR-3 auger-driven snow and swamp vehicle was created taking into account future practical application in two roles at once. Tests have shown that this machine is capable of solving the assigned tasks, but at the same time it has a number of characteristic problems that prevent full-scale work. It was proposed to correct the identified deficiencies in the framework of the new project. Taking into account the accumulated experience, all-terrain vehicles ZIL-2906 and ZIL-29061 were created. They entered the service and still remain in operation, ensuring the timely evacuation of the landed astronauts.
Based on:
http://gvtm.ru/
http://denisovets.ru/
http://kolesa.ru/
https://popmech.ru/
R. Danilov Pne-3 auger snow and swamp vehicle. // Technique and weapons, 2010. No.11.
Information