Domestic Unmanned Aviation (Part of 2)

As already mentioned in the first part of the review, in the first post-war years, radio-controlled aircraft with piston engines were actively used to ensure the testing of new types of weapons and combat training of air defense forces. However, the aircraft built during the Second World War, for the most part, had a very small resource, and most of them fell into disrepair a few years after the end of the war. In addition, due to the rapid pace of development aviation in the late 40s and early 50s, tests and training required targets corresponding to the speed of flight corresponding to the modern combat aircraft of a potential enemy. During the most critical tests, the MiG-15, MiG-17 radio-controlled fighters and the Il-28 bombers that were flying out of their resources were used. But it was quite expensive to re-equip serial cars, and besides, there were very few aircraft that were sufficiently modern at that time for targets to be used as targets.
In this regard, in 1950, Air Force Commander Marshal K.A. Vershinin proposed to create a radio-controlled target. In June, a government decree was issued, according to which this work was entrusted to OKB-301 under the direction of S.A. Lavochkin. Particular attention was paid to reducing the cost of the product, designed for one "sortie". When designing a radio-controlled target that received the preliminary designation “Product 201”, the OKB-301 specialists took the path of maximum simplification. For the target aircraft they chose a cheap straight-through jet engine RD-900 (diameter 900 mm), which worked on gasoline. With a dry weight of the engine 320 kg, the calculated thrust at the speed of 240 m / s and the height of 5000 meters was 625 kgf. The ramjet RD-900 had a resource of about 40 minutes. There was no fuel pump on the apparatus, the fuel from the tank was supplied by an injection system operating from an air pressure accumulator. In order to maximally simplify production, the wing and tail assembly were performed straight. For powering the radio command equipment, a DC generator with a wind turbine drive in the nose of the device was used. The most expensive parts of the “201 Product” were the radio control equipment and the autopilot AP-60. The appearance of the unmanned target came out quite inconspicuous, but it completely corresponded to its purpose. To launch air targets, it was intended to use a four-engine long-range bomber Tu-4, one target could be placed under each plane.

Tu-4 with hanging unmanned targets
Flight tests of "Products 201" began in May 1953, at the proving ground near Akhtubinsk. State tests ended in October 1954. During the tests, we managed to get the maximum speed of 905 km / h and the practical ceiling - 9750 meters. The 460 l fuel tank for an unmanned aircraft was only enough for 8,5 minutes of flight, while the ramjet engine was reliably launched at altitudes 4300 — 9300 meters. According to the test results, the military recommended increasing the engine uptime to 15 minutes, increasing the EPR by mounting corner reflectors and installing tracers on the wingtips.
The main disadvantage was the long preparation of the device for use. Especially laborious was the suspension on the carrier aircraft. It was not possible to achieve reliable operation of the parachute rescue system during the tests.

To save the target for the purpose of re-use, it was decided to plant it from planning to the engine below the fuselage. Flight tests confirmed that it was possible, but after such a landing, due to the deformation of the engine nacelle, a ramjet engine was required to be replaced.
La 17 on a trolley
After the official adoption of the "Product 201" received the designation La 17. Serial production of the target was established at the plant number 47 in Orenburg. Deliveries of the first production machines began in the 1956 year. For the use of the La-17 at the Kazan Aviation Plant No. 22, six Tu-4 bombers were refined. The serial construction of the La-17 lasted until the 1964 year, the production program included the production of unmanned targets per year to 300.
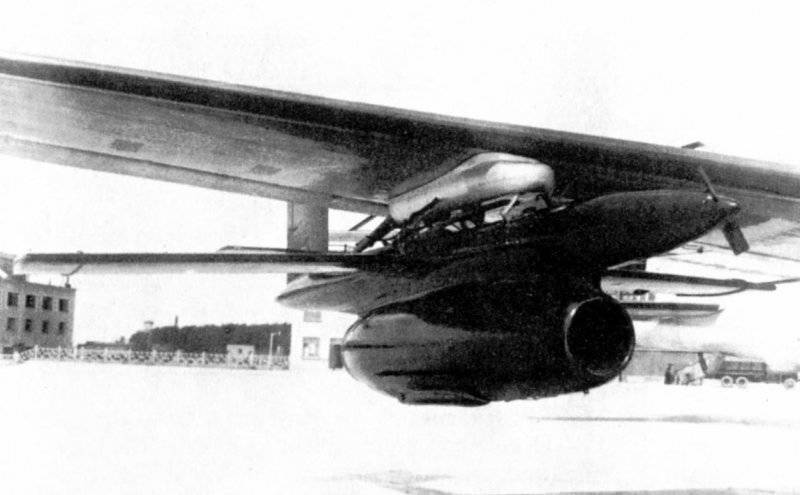
La 17 under the wing of the Tu-4
The target was quite satisfactory for its purpose, but at the end of the 50-s it became clear that the Tu-4 piston will soon be decommissioned, and the air-launch system requires too much time to prepare for use and is quite expensive. The military wanted to expand the capabilities of the target and reduce operating costs. As a result, the developers came to the idea of the need to replace the ramjet with a turbojet engine and the transition to start from a ground launcher.
La xnumx
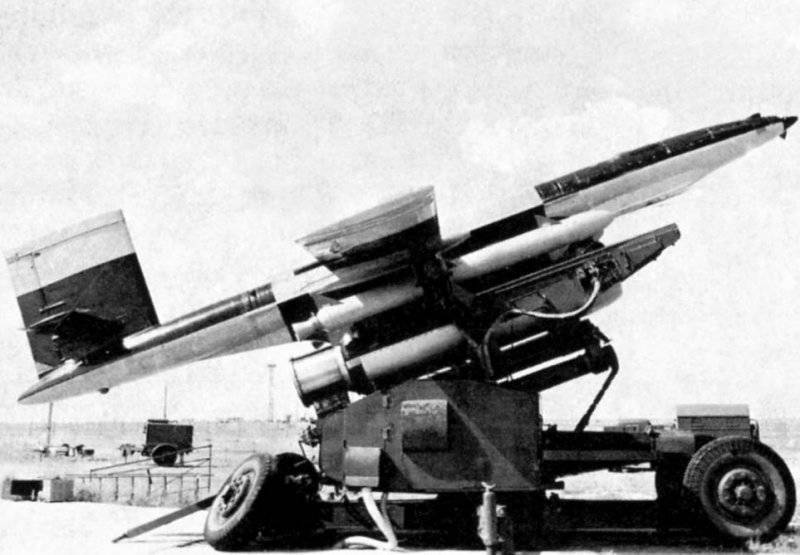
In 1958, the production of the La-17М target with the RD-9BK turbojet 2600 kgf turbojet and ground launch began. TRD RD-9BK was a modification of the out-of-life engine RD-9B, removed from the MiG-19 fighter. The launch took place with the help of two solid-fuel boosters, and a four-wheel carriage 100-mm anti-aircraft gun KS-19 was used as a towed launcher.

Launch La Xnumx
In 1962, the La-17 was once again upgraded. For the tests and the process of combat training of calculations of the air defense system required targets that can fly in the range of heights: 0,5 — 18 km, change the reflectivity of the target to simulate cruise missiles, as well as tactical and strategic bombers. To do this, the RD-9BKR engine with increased altitude was installed on the target aircraft, and a Lüiberg lens was placed in the rear fuselage. Thanks to the increased ESR, the tracking range of the 3-6 ground-based radar increased from 150 — 180 km to 400 — 450 km, and the type of simulated aircraft expanded.
In order that the modernized La-17MM could be reused, after launching, the landing system was modified. In the rear part of the fuselage, a dumped load connected by a cable with a check was installed, which, when pulled out, the autopilot moved the target to a large angle of attack at the minimum design height, and at the same time the engine stopped. Parachuting, the target landed on skis with shock absorbers placed under the TRD gondola.
Since the stocks of the RD-9 engines were quickly exhausted, instead of them in the 70-s began to install TRD P-11K-300, converted from exhausted P-11F-300, installed on the MiG-21, Su-15 and Yak-28 aircraft . The target with engines of the P-11K-300 type was designated La-17K and was serially produced until the end of the 1992 of the year.
La 17K on the launcher
Despite the fact that the targets of the La 17 family at the moment are undoubtedly outdated and unable to imitate modern means of air attack, they have until recently been used in test sites during control and training firing air defense calculations.

After adopting the La-17 unmanned target with a ramjet RD-900, the question arose of creating an unmanned reconnaissance aircraft based on this vehicle. A government decree on this topic was issued in June 1956. However, the target with a direct-flow jet engine had a short range, and to the practical implementation of the project, it was broken only after the appearance of the La-17M with TRD RD-9BK 1900 kgf.
The AFA-BAF / 2K and AFA-BAF-21 cameras were placed in the forward compartment of the reconnaissance aircraft. The autopilot was replaced by AP-63. For the convenience of transporting reconnaissance console wing made folding. The unmanned reconnaissance vehicle from the CATP-1 transport and launcher on the chassis of the ZIL-134K was launched using two solid propellant launch accelerators PRD-98, and rescue by parachute with a landing on the engine nacelle. Corner reflectors placed under the radio transparent fairing wingtip and fuselage, dismantled.
During state tests, which ended in the summer of 1963, it was proved that the machine is able to carry out photo reconnaissance at a distance of 60 km from the launch position, flying at altitudes up to 900 m, and at a distance of 200 km - at an altitude of 7000 m. 680 — 885 km / h. Starting weight - 3600 kg.
La 17P on the launcher
In 1963, the La-17R as part of the TBR-1 complex (tactical unmanned reconnaissance aircraft) was formally put into service, but operation in the army began only in the second half of the 60s. This was due to the fact that it required the refinement of ground control and tracking stations for reconnaissance drone.
It was envisaged that the tactical unmanned reconnaissance complex of the TBR-1 scout could be sufficiently mobile, with an acceptable deployment time at the launch position. The complex includes: the KRAZ-255 towed by car, the SATR-1 launch system, the TUTR-1 transport trucks, towed by the ZIL-157 or ZIL-131 vehicles, the KATR-1 special vehicle for carrying out a pre-launch test of a reconnaissance aircraft, a reconnaissance vehicle, a reconnaissance vehicle, a reconnaissance vehicle, a reconnaissance vehicle, a vehicle for a pre-launch inspection of an aircraft reconnaissance vehicle, a reconnaissance vehicle, a vehicle for a pre-launch test of a reconnaissance aircraft, a reconnaissance vehicle, a reconnaissance vehicle, a vehicle for a pre-launch test of a reconnaissance aircraft, a reconnaissance vehicle, a vehicle for a pre-launch test of a reconnaissance aircraft, a reconnaissance vehicle, a reconnaissance vehicle, a vehicle for a pre-launch test of an aircraft reconnaissance vehicle, a reconnaissance vehicle, a haul test vehicle , as well as radio command and radiolocation stations MRV-2M and Kama to control the unmanned reconnaissance aircraft on the flight route. A separate squadron of unmanned reconnaissance aircraft also had a technical-operational platoon, equipped with special vehicles for working with cameras, truck cranes and other equipment, as well as a unit ensuring the landing of La-17P in a given area and retrieval from the board of reconnaissance materials and evacuation of the aircraft.
After upgrading the capabilities of the unmanned reconnaissance aircraft La-17RM, equipped with the P-11K-300 engine, have expanded. The range at high altitude increased from 200 to 360 km. In addition to the updated photo intelligence equipment in the form of cameras AFA-40, AFBA-40, AFA-20, FFT-21, ASChFA-5M and the television camera Chibis, the Sigma station of radiation reconnaissance was added to the onboard equipment. In the Soviet Air Force, the La-17РМ were operated until the middle of the 70-s, after which the unmanned targets were “utilized” at the test sites as target airplanes.
A number of La-17 various modifications were delivered to the allied countries of the USSR. In 50-s, unmanned targets with a ramjet engine could be met at Chinese test sites. As in the USSR, they were launched from Tu-4 bombers. Unlike the Soviet air force, piston-engined bomber flew in the People's Republic of China until the beginning of the 90-s. At the end of their career, the Chinese Tu-4 was used as the carrier of reconnaissance UAVs. In 60, the Chinese aviation industry launched the La-17 with a WP-6 turbojet engine (a Chinese copy of the RD-9). This turbojet engine was used in the PLA Air Force on J-6 fighter jets (copy of the MiG-19) and Q-5 attack aircraft. In addition to the supply of target aircraft and technical documentation for their mass production in the People's Republic of China, a batch of unmanned reconnaissance aircraft La-17РМ under the designation UR-1 was transferred to Syria. However, whether they were used in a combat situation is unknown.
Adoption of a supersonic tactical reconnaissance bomber MiG-25РБ, which the avionics of which, in addition to various photographic equipment, included electronic reconnaissance stations, was adopted by the Soviet air forces, which greatly expanded the capabilities for collecting information in the enemy’s operational rear. As is known, at the beginning of the 70's, the Israelis did not succeed in obstructing the flight of MiG-25Р and MiG-25РБ over the Sinai Peninsula. But the Soviet experts were fully aware that when operating over the theater, where there will be long-range and high-altitude air defense systems, high altitude and speed of flight can no longer guarantee the invulnerability of the reconnaissance aircraft. In this regard, at the end of the 60-x military initiated the development of supersonic reusable unmanned tactical-level reconnaissance aircraft. The military required vehicles with a greater range and speed of flight than those in service with the La-17Р / РМ. In addition, a very primitive reconnaissance complex of devices created on the basis of an unmanned target did not meet modern requirements. The customer wanted to get scouts capable of acting in the depth of the enemy's defense at nearsonic cruising speed. Apart from modern means of fixing visual information, the equipment intended for radiation reconnaissance of the terrain and the opening of air defense systems and radar stations was to be part of the reconnaissance equipment of promising vehicles.
In the middle of the 60-ies, the development of Strizh and Reis tactical intelligence complexes began at the Tupolev Design Bureau. The result of this work was the creation and adoption of the operational-tactical complex Tu-141 (BP-2 "Swift") and the tactical complex Tu-143 (BP-3 "Reis"). The Strizh, unmanned tactical-operational intelligence reconnaissance system BP-2 is designed to conduct reconnaissance operations at a distance of several hundred kilometers from a launch point, while Reis BP-3 km is 30-40 km.
At the first design stage, it was envisaged that unmanned reconnaissance aircraft would break through the air defense lines at low altitude at supersonic speeds. However, this required engines equipped with afterburner chambers, which inevitably led to increased fuel consumption. The military also insisted that the unmanned reconnaissance of a new generation, when returning from a combat departure, should land on its own airfield by means of a special manufactured ski. But the calculations showed that the high speed of flight and aircraft landing, with some increase in combat effectiveness, significantly increases the cost of the device, despite the fact that the duration of his life in the war could be very short. As a result, the maximum flight speed was limited by the 1100 km / h limit, and it was decided to land using a parachute rescue system, which in turn simplified the design and reduced the take-off weight and cost of the aircraft.

Unmanned reconnaissance Tu-141 and Tu-143 in the Museum in Monino
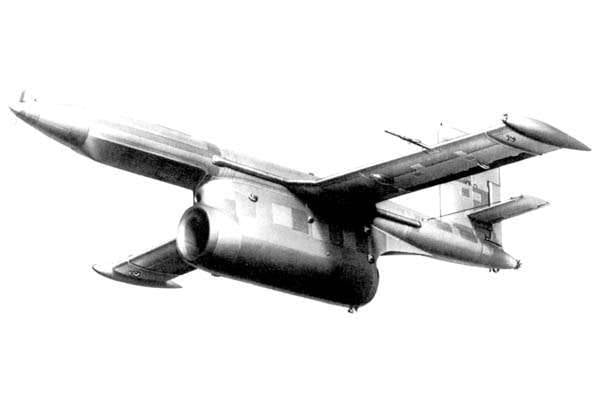
Unmanned reconnaissance Tu-141 and Tu-143 had a lot in common, but differed in geometric dimensions, weight, range, composition and capabilities of onboard reconnaissance equipment. Both devices were built according to the “tailless” scheme with a low-lying triangular wing with a sweep along the leading edge 58 °, with small overlaps in the root parts. In front of the fuselage there is a fixed trapezoidal destabilizer, which provided the necessary stability margin. PGO - rearranged on the ground in the range from 0 ° to 8 °, depending on the centering of the aircraft, with a sweep angle on the leading edge 41,3 °. Control of the aircraft was carried out using two-piece elevons on the wing and rudder. The engine air intake is located above the fuselage, closer to the tail section. Such an arrangement not only made it easier to set up a launch complex, but also reduced the radar visibility of an unmanned reconnaissance aircraft. To reduce the wing span when transporting the wing console, the Tu-141 was deflected to a vertical position.
The first copies of the Tu-141 were equipped with a short-life TRD P-9A-300 (a specially modified modification of the TRD RD-9B), but later, after the establishment of mass production, they switched to the release of reconnaissance aircraft with KR-17А engines with 2000 kgf. An unmanned reconnaissance aircraft with a take-off mass of 5370 kg, at an altitude of 2000 m, developed a maximum speed of 1110 km / h and had a range of 1000 km. The minimum flight altitude on the route was 50 m, the ceiling - 6000 m.

Start Tu-141
The launch of the Tu-141 was carried out using a solid-fuel starting accelerator mounted at the bottom of the fuselage. Landing unmanned reconnaissance after the assignment was carried out using a parachute system, located in the fairing in the rear fuselage above the nozzle of the turbojet engine. After shutting down the TRD, a braking parachute was produced, reducing the flight speed to a value at which the main parachute could be safely released. Tricycle landing gear with heel type shock absorbing elements were produced simultaneously with the brake parachute. Immediately before touching the ground, the inclusion of a brake solid-fuel engine and the shooting of a parachute occurred.

The complex of ground facilities included machines designed for refueling and preparation for launch, towed launch installation, control and test installations and hardware to work with reconnaissance equipment. All elements of the BP-2 “Strizh” complex were placed on a mobile chassis and could move on public roads.

Unfortunately, exact data on the composition and capabilities of the Strizzh reconnaissance complex BP-2 could not be found. Various sources state that the Tu-141 was equipped with navigation equipment, aerial cameras, an infrared reconnaissance system, means for determining the types and coordinates of operating radars and producing radiation reconnaissance, perfect for its time. On the route, the unmanned reconnaissance aircraft was controlled by the autopilot, maneuvers and the on-off reconnaissance equipment took place according to a predetermined program.
Flight tests of the Tu-141 began in the 1974 year, due to the high complexity of the reconnaissance complex required the coordination and refinement of onboard and ground equipment. Serial production of the drone began in 1979 year at the Kharkov Aviation Plant. Before the collapse of the USSR, an 152 copy of a Tu-141 was built in Ukraine. Separate reconnaissance squadrons equipped with unmanned reconnaissance aircraft of this type were deployed on the western borders of the USSR. At the moment, workable Tu-141 can be available only in Ukraine.
At the time of its creation, the intelligence complex BP-2 "Swift" was fully consistent with its purpose. The unmanned reconnaissance vehicle possessed sufficiently wide capabilities and had good chances to accomplish the mission, which was repeatedly confirmed at the exercises. A certain amount of Tu-141 with the exhausted flight resource was remade into M-141 targets. Target complex received the designation BP-2ВМ.
According to the layout scheme and technical solutions, the unmanned reconnaissance Tu-143 was a kind of reduced copy of the Tu-141. The first successful flight of the Tu-143 took place in December 1970. In 1973, an experimental batch of UAVs was laid to conduct state tests at the aircraft factory in Kumertau. The official adoption of the Tu-143 occurred in 1976 year.

Tu-143
The unmanned reconnaissance vehicle with a launch weight of 1230 kg was launched from the mobile launcher SPU-143 on the meringue of the wheeled tractor BAZ-135MB. The Tu-143 was loaded into the launcher and evacuated from the landing site using a TZM-143 transport-charging machine. Delivery and storage of UAVs were carried out in sealed containers. The range of relocation of a complex with a reconnaissance prepared for launch is up to 500 km. At the same time, technical ground facilities of the complex could move along the highway at a speed of - up to 45 km / h.

Loading the reconnaissance Tu-143 onto the SPU-143 transport and launcher using the TZM-143 transport-charging machine
The maintenance of the UAV was carried out using the KPK-143 control and test complex, a set of mobile equipment for refueling a truck crane, firefighters and trucks. Prelaunch, which occupied about 15 mines, was carried out by the combat crew of SPU-143. Immediately before the launch, the turbojet main engine TRZ-117 was launched with a maximum load of 640 kgf, and the unmanned reconnaissance vehicle was launched using the SPRD-251 solid-fuel accelerator at an angle 15 ° to the horizon. The safe separation of the SPRD-251 was provided by a special pyro cartridge, triggered by the pressure drop of the gases in the starting accelerator.

Start Tu-143
The reconnaissance complex BP-3 "Flight", which was originally created by order of the Air Force, was widely used in the USSR armed forces, and was also used by the Ground Forces and the Navy. In the course of joint large-scale exercises of various branches of the armed forces, the Reis complex demonstrated significant advantages in comparison with manned tactical reconnaissance aircraft MiG-21P and Yak-28P. The flight of the Tu-143 was performed on the programmed route using an automatic control system, which included an autopilot, a radio altimeter and a speed meter. The control system provided a more accurate unmanned vehicle access to the reconnaissance sector, compared with manned tactical reconnaissance aircraft of the Air Force. The reconnaissance UAV was able to fly at low altitude at speeds up to 950 km / h, including in areas with complex terrain. The relatively small size provided the Tu-143 with low visual visibility and a small ESR, which, combined with high flight data, made the drone a very difficult target for air defense systems.

The reconnaissance equipment was located in the replaceable nose and had two main options: a photo and a television fixation of the image on the route. In addition, radiation reconnaissance equipment and a container with leaflets could be placed on the drone. The BP-3 “Flight” complex with a Tu-143 UAV was able to conduct tactical aerial reconnaissance at daylight to a depth of 60-70 km from the front line using photo, television and radiation background equipment. At the same time, wereal and point targets were detected in the 10 H (H-flight altitude) bandwidth when using cameras and 2,2 H when equipped with television intelligence equipment. That is, the width of the photography from a height of 1 km was about 10 km, television shooting - about 2 km. The photographing intervals for photographic intelligence were set depending on the height of the flight. The photographic equipment installed at the head of the reconnaissance aircraft from a height of 500 m and at a speed of 950 km / h made it possible to recognize objects on the ground from 20 cm in size. The reconnaissance complex turned out to be very effective in conditions of use in mountainous areas with starts and landings at platforms at altitudes up to 2000 m above sea level and during mountain fly-overs up to 5000 m. On-board television equipment transmitted a television image of the area over the air to the drone control station. Reception of the television image was possible at a distance 30-40 km from the UAV. The bandwidth of the radiation reconnaissance reaches 2 H and the information obtained can also be transmitted to the ground by radio. The reconnaissance equipment Tu-143 included a panoramic aerial camera PA-1 with a reserve of 120 film m and TV equipment I-429B Chibis-B and radiation reconnaissance equipment Sigma-R. Also considered was the creation of a cruise missile based on the Tu-143, but there is no data on the testing of this modification and its adoption for service.
Before landing in a given area, the Tu-143 simultaneously with the engine stop produced a slide, after which the two-stage jet-parachute system and chassis were released. When the ground touched, when the landing gear shock absorbers were triggered, the landing parachute and the brake engine were fired, thereby preventing the reconnaissance aircraft from overturning due to the parachute's windage. The search for the landing site of the unmanned reconnaissance aircraft was carried out by signals from the onboard radio beacon. Further, the container with the reconnaissance information was taken out and the UAV was delivered to a technical position for preparation for reuse. Resource Tu-143 was designed for five sorties. The processing of photographic materials took place at a mobile point of reception and decryption of intelligence information UNDER-3, after which the received data was transmitted online via communication channels.
According to information published in open sources, taking into account the prototypes intended for testing, in the period from 1973 to 1989 more than 950 copies of Tu-143 were built. In addition to the Soviet armed forces, the complex BP-3 "Flight" was in service in Bulgaria, Syria, Iraq, Romania and Czechoslovakia.

Tu-143 in the exposition of the aviation museum in the Czech Republic
In 2009, the media reported that Belarus had acquired a batch of UAVs in Ukraine. Unmanned reconnaissance aircraft were used in real combat operations in Afghanistan and during the Iran-Iraq war. In 1985, the Syrian Tu-143 was shot down over Lebanon by an Israeli F-16 fighter. At the start of the 90, several Tu-143 were purchased by the DPRK in Syria. According to Western sources, the North Korean counterpart has been launched into mass production and has already been used during reconnaissance flights over the South Korean water area of the Yellow Sea. According to Western experts, North Korean copies of the Tu-143 can also be used to deliver weapons mass destruction.
At the end of the 90-ies, the Tu-143, available in Russia, were massively re-equipped into M-143 targets designed to simulate cruise missiles in the process of combat training of air defense forces.

Preparation for use of the Ukrainian unmanned reconnaissance aircraft Tu-143
By the time of the beginning of the armed confrontation in the south-east of Ukraine in the APU there was a number of UAV Tu-141 and Tu-143 in storage. Prior to the beginning of the conflict, their operation was assigned to the 321-th separate squadron of unmanned reconnaissance aircraft deployed in the village of Raukhovka, Berezovsky District, Odessa Region.

Tu-143 who made an unauthorized landing in an area controlled by the DPR militia
Unmanned aerial vehicles removed from conservation were used for photo reconnaissance of the militia positions. Before the truce was announced in September 2014, the drones built in the USSR explored an area of more than 250 000 ha. Having taken pictures of 200 objects, including 48 roadblocks and more 150 infrastructure objects (bridges, dams, intersections, road sections). However, the instrument equipment of the Soviet-made UAVs is now hopelessly outdated - a photographic film is used to record the results of the reconnaissance, the device must return to its territory, the film must be removed, delivered to the laboratory, developed and deciphered. Thus, real-time intelligence is not possible, the time span from the moment of the survey to the use of data can be significant, which often depreciates the result of the exploration of mobile targets. In addition, the technical reliability of technology, created about 30 years ago, leaves much to be desired.
In open sources, there are no statistics of combat missions of the Ukrainian Tu-141 and Tu-143, but quite a lot of photos of UAVs were posted on the positions and during transportation made in the summer-autumn 2014 of the year. However, at present, fresh pictures of Ukrainian UAVs of this type are not published, and the military DPR and LPR do not inform about their flights. In this regard, it can be assumed that the stocks of Tu-141 and Tu-143 in Ukraine are mostly exhausted.
Soon after the adoption of the BP-3 Reis intelligence complex, a Resolution of the USSR Council of Ministers on the development of the Reis-D upgraded BP-ZD complex was issued. The first flight of the prototype UAV Tu-243 took place in July 1987. While maintaining the airframe, the reconnaissance complex underwent substantial refinement. In the past, the military criticized BP-3 “Flight” for its limited ability to transmit intelligence information in real time. In this regard, in addition to the airborne camera PA-243, the advanced television equipment “Aist-M” was installed on the Tu-402. In another variant, intended for conducting reconnaissance at night, the Zima-M thermal imaging system is used. The image received from television and infrared cameras is transmitted via a radio channel organized by means of the radio equipment “Route-M”. In parallel with the transmission over the air, the information during the flight is recorded on the onboard magnetic media. New, more sophisticated reconnaissance equipment, in combination with improved characteristics of the UAV, allowed a significant increase in the area under study in one flight of the territory while improving the quality of the information received. Thanks to the use of the new navigation and flight complex NPK-243 on the Tu-243, the capabilities of BP-ZD “Reis-D” have increased significantly. In the course of the upgrade, some elements of the ground complex were also updated, which made it possible to increase the efficiency of the tasks and operational characteristics.

Tu-243 at the MAKS-99 air show
According to the information presented at the MAKS-99 aerospace show, the Tu-243 reconnaissance unmanned vehicle has a take-off weight of 1400 kg, a length of 8,28 m, a wingspan of 2,25 m. The TRB-117А turbojet engine with a 640 kg-cf engine, provides a cross-country counter with a crest; 850 km / h. The maximum flight altitude on the route is 940 m, the minimum is 5000 m. The flight distance is increased to 50 km. Launch and method of application of the Tu-360 are similar to the Tu-243. This reconnaissance drone at the end of the 143-x was offered for export. It is alleged that the Tu-90 was officially adopted by the Russian army in 243, and its serial construction was conducted at the facilities of the Kumertau aviation production plant. However, apparently, the number of built Tu-1999 was very small. According to the data presented by The Military Balance 243, there is a certain amount of Tu-2016 UAVs in service with the Russian army. It is not known how much this is true, but at the moment the reconnaissance complex VR-ZD "Reis-D" no longer meets modern requirements.
To be continued ...
Based on:
https://militarizm.livejournal.com/51079.html
http://zonwar.ru/news/news_110_Tu-141_Strish.html
http://www.arms-expo.ru/articles/124/81839/
http://aviation21.ru/3582-2/
http://rusvesna.su/news/1406935390
http://nevskii-bastion.ru/tu-243-maks-1999/
https://defendingrussia.ru/enc/bpla/tu143_krylataja_raketarazvedchik-1531/
http://www.arms-expo.ru/049055055056124052052048048.html
https://militarizm.livejournal.com/51079.html
https://vpk.name/library/reys-d.html
http://www.razlib.ru/transport_i_aviacija/aviacija_i_kosmonavtika_2004_01/p3.php
http://todaysmilitary.ru/2016/01/21/vnutri-tajnoj-programmy-bpla-severnoj-korei/
Information