All-terrain vehicle for astronauts
Special Design Bureau Automobile them. I.A. Likhachev initially developed the technique of high cross only in the interests of the army. Later other organizations became interested in similar projects, including the space industry. The leadership of the latter initiated the development of special all-terrain vehicles capable of finding the landed astronauts, evacuating them, and also taking their spacecraft. The first representative of such a line of special equipment was the PES-1 machine.
During the first years of development, the Soviet manned cosmonautics had certain problems with the search and evacuation of the landing crews. The search for the landing site was carried out with the help of airplanes and helicopters with appropriate radio equipment, after which available vehicles with rescuers, doctors, engineers, etc., were to arrive in a given area. This set of measures met the basic requirements, but was not without flaws. Thus, in the landing areas, the weather was often bad, and the landing of astronauts in an inaccessible area could seriously complicate the work of rescuers.

Machine PES-1 in the museum. Photos of the State Military Technical Museum / gvtm.ru
At the end of 1964, the general designer of rocket-space systems S.P. Korolev made a proposal to create special ultra-high-terrain vehicles capable of finding and collecting astronauts, regardless of the weather and the landing site. Soon this proposal turned into a task for the Special Design Bureau of the Plant. Likhachev (SKB ZIL), headed by V.A. Grachev. In December, the Air Force Command approved the requirements for a new life-saving tool, and a technical task was soon drawn up. By the beginning of spring 1965, SKB ZIL specialists were engaged in designing a promising machine.
Long before the completion of development work, practice confirmed the need for a new all-terrain vehicle. On March 19, 1965, the Voskhod-2 spacecraft with a failed landing system landed at a considerable distance from the calculated area. Cosmonauts P.I. Belyaev and A.A. Leonov had two days to wait for help in a remote taiga area. Fortunately, they were found and taken out "to the mainland" by rescue forces aviation. This incident showed how useful a rescue all-terrain vehicle could be.
According to known data, the new “space” project of SKB ZIL received two names. The factory documentation included the designation ZIL-132K, indicating the application of some solutions of the project already under development. At the same time, the official name of the PES-1 - “Search and evacuation unit, the first model” was used. Subsequently, the factory name was forgotten, and almost always a special machine is referred to as PEU-1.
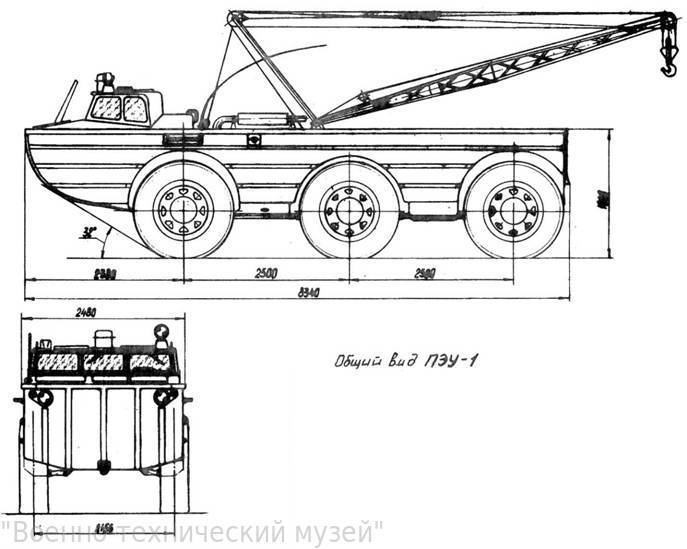
The scheme of the all-terrain vehicle. Picture of the State Military Technical Museum / gvtm.ru
In accordance with the new ideas of S.P. The Queen and his colleagues, the search for the descent vehicle was still to be carried out by aviation. After identifying the approximate landing area, it was proposed to deliver the PES-1 all-terrain vehicle to the work site. In this regard, the latter, in terms of size and weight, was supposed to fit within the restrictions of the cargo cabins of the An-12 aircraft and the Mi-6 helicopter. The car had to move on land and water. It was necessary to ensure the possibility of transporting people and goods in the form of a descent vehicle. On board the all-terrain vehicle, it was necessary to carry a large number of various rescue equipment.
Creating a search and evacuation unit with specific characteristics and appearance was not the easiest thing, but the designers of SKB ZIL successfully coped with it. Having a solid experience in designing and construction of all-terrain vehicles with different capabilities, the design office was able to form the best variant of the all-terrain vehicle, fully satisfying the technical task. To solve the problems posed, it was necessary to use some ready-made ideas, but it required the development of a number of new proposals.
The result of the work of V.A. Grachev and his colleagues became a three-axle all-wheel drive vehicle with a displacement hermetic housing of a recognizable type. On board the PES-1 a variety of instruments and devices with different functions should have been present. So, the rescue vehicle needed special radio navigation equipment, and to work with descent vehicles, it needed its own crane and special support device.

The front of the case with open covers. In the background you can see the tilted cap of the cabin, on the front - the cover of the hardware compartment. Photo Os1.ru
For the first time in the domestic practice in the ZIL-132K project, a large-sized welded aluminum frame was used. The frame was assembled from a set of longitudinal and transverse metal profiles connected with kerchiefs. The central part of the frame was provided with an X-shaped brace, which allowed it to withstand heavy loads. The development of the frame required the creation and implementation of new technologies for assembling large-size loaded aluminum structures.
Outside, the aluminum frame was covered with fiberglass housing. It was made in the form of a unit of large elongation bath with a characteristic rounded front and vertical sides. In the latter there were large arches, due to which the wheels did not extend beyond the hull. Behind the fiberglass bath had a vertical forage leaf. On top of the case there were several units. In front of the machine, a radio equipment cover with several hatches was provided; behind her have provided a folding cockpit cap. Behind the cabin there was a flat platform for a crane, and in the stern there was a relatively deep body for the descent vehicle.
Due to the special tasks and the specific distribution of loads, PES-1 has received the appropriate layout. In front of the hull was a compartment for radio navigation devices, with which it was proposed to balance the heavy load in the stern. Immediately behind him placed quite a large cabin. Behind the cab was the installation of the engine and some transmission devices. In connection with the use of all-wheel drive chassis under the transmission had to give large amounts in the lower part of the body.
The all-terrain vehicle received a ZIL-375 gasoline engine with horsepower 180. In a small engine compartment due to the dense layout, it was possible to place all the necessary devices, including a fuel tank with a capacity of 365 l. The silencer of the exhaust system brought to the roof of the hull deck. A transmission with onboard power distribution, built on the basis of hydromechanical and mechanical devices, was connected to the engine. A part of its units was borrowed from the ZIL-135L army vehicle.

PED-1 all-terrain vehicle is being tested. Photo Os1.ru
A torque converter connected to the engine followed by an automatic transmission. Then the torque hit the transfer case, which distributed it between the wheels of the two sides and the water cannon. The shafts from the transfer case approached the middle and rear wheels on each side and connected to the gearboxes. With the help of several cardan shafts, the power went from the central axis to the front one. Each wheel received an angular and spur gear. To increase the buoyancy of the cavity, the gearboxes could be flushed with air.
The all-terrain vehicle was equipped with a three-axle chassis with large-diameter wheels with a combined suspension. The front and rear axles received an independent torsion bar suspension, and the middle wheels had stiff mounts. It was originally planned to use tractor tires I-175 with a diameter of 1523 mm and a width of 420 mm, but because of its original purpose, such products could not withstand loads during high-speed driving. The problem was solved with the help of the Research Institute of Tire Industry and the Dnepropetrovsk Tire Plant. The joint efforts of the three organizations created new ID-15 tires with the required dimension and the desired resource. PES-1 wheels have a centralized tire pressure regulation system. The first and third axes were made manageable.
Aft propulsion unit was located in the stern of the hull. The intake window of this device is placed in the bottom. The stream of water was thrown through an oval window in the aft part. Thrust vectoring was carried out using two steering feathers placed inside the hull.
In front of the hull was a four-seater cockpit. The driver and rescuers or astronauts were located on the folding seats of the simplest design. Get into the car offered in an unusual way. The cabin did not have doors, but its upper cap, which was above the level of the hull's deck, could fully fold up and back. In addition, a pair of hatches was provided in its roof. Developed cabin glazing provided all-round visibility. On the ground crew had all the necessary controls. So, the driver could control the work of the chassis, while other crew members had to use radio navigation equipment and other devices.
Rise on a steep slope. Photo Os1.ru
For communication with the base, other rescuers or astronauts, the search and evacuation unit carried a pair of P-855U radio stations. In addition, for work in remote and remote areas, the car was equipped with navigation equipment. With its help, the crew could monitor their location, as well as go to a given point. The maximum radial error during navigation did not exceed 6% of the distance traveled.
In accordance with the requirements of the customer, the PES-1 was to evacuate not only the astronauts, but also their descent module. For his loading aboard all-terrain vehicle got a crane. Above the engine compartment a reinforced base was placed for a turntable with a crane boom. The latter was made in the form of a metal truss with a rise due to winch cables. The boom reach reached 4,9 m, it was possible to lift it at an angle of up to 75 °. The maximum load carrying capacity is 3 t. The crane was operated with an electric winch of the type LPG-GO with two drums. The first was responsible for the cables controlling the position of the boom, while the second was for lifting the load. Crane controlled remote wired remote.
The aft part of the hull was given under the lodgement for the installation of the descent vehicle. The spacecraft was proposed to be installed vertically on the support part of the required shapes and sizes. On the cargo platform, it was possible to install several types of cradles, designed for different descent vehicles. On top of the load should wear a mooring ring with a set of stretch marks. To facilitate loading and unloading part of the rear side of the hull performed folding.

PES-1 with a descent vehicle. Photos of the State Military Technical Museum / gvtm.ru
In case of working with a descent vehicle in water, the left side of the hull received a mooring circle. Before mooring it was proposed to put on a special inflatable belt. Towing of the moored descent vehicle was allowed at waves of height not more than 1 m.
In the case of PES-1 there were boxes for transportation of various additional equipment. On board the car were stored inflatable boat, towing cables, tailing tools, fire extinguisher, etc. Also provided for transportation of first-aid kits with the necessary set of equipment and medicines.
For serial all-terrain vehicles of the new model has been developed a special color. The lower part of the hull, before the conditional waterline, was painted in red. The rest of the sides, up to the roof-deck, was ivory. The deck and cabin cap were proposed to be bright orange. Similar coloring of PES-1 provided high visibility on different landscapes. The car could easily be noticed both from the air and from the ground or from the water.
The special purpose machine had not the smallest dimensions. The all-terrain vehicle reached 8,4 m (including the crane in the stowed position - 9,62 m), width - 2,58 m, height - 2,5 m (with a crane - 3,7 m). Wheelbase - 5 m with inter-wheel spans 2,5 m. Track - 2,15 m. Curb weight PES-1 / ZIL-132K was determined at the level of 8,17 t. Gross weight - 3 t. 11,72 km / h. The water cannon provided acceleration to 68-7 km / h. The fuel range was 7,5 km.

Astronauts are studying a new search and evacuation unit, 1966. Photo by the State Military Technical Museum / gvtm.ru
The three-axle chassis with large-diameter wheels ensured high throughput on any surfaces and landscapes. With a load, the all-terrain vehicle could climb the slope of the 30 ° steepness and move with roll to the 22 °. The minimum turning radius provided by a pair of controlled axes did not exceed 10 m.
Designers SKB ZIL managed to successfully solve the tasks, but it took a long time. The first prototype of the ZIL-132K / PES-1 machine was built only in the summer of 1966 — about a year and a half after receiving the corresponding task. The prototype was immediately sent to the factory tests. At the same time it was shown to representatives of the space industry. Among others, cosmonauts Yu.A. Gagarin and A.A. Leonov. Representatives of the customer praised the new all-terrain vehicle.
In the year 1967 them. Likhachev built a second experimental search and evacuation unit. By this time, most of the shortcomings of the project was eliminated, and both prototypes soon came to the state tests. Inspections of two PES-1 were carried out at different test sites and highways in different regions of the Soviet Union. The equipment was tested in virtually all conditions in which she could fall during her further service. In all cases, all-terrain vehicles showed themselves well and confirmed the calculated characteristics.

All-terrain vehicle PEU-1M "Salon". Photos of the State Military Technical Museum / gvtm.ru
In the next year, 1968, ZIL handed over to the air force an installation batch of five special vehicles of new construction. For some time, the search and rescue units of the Air Force studied and mastered the new technique. In August, an order appeared on 1969, according to which PES-1 was accepted for supply by the armed forces. Now the new technology, both already built and planned for the order, was to become a full-fledged element of the cosmonauts search and evacuation system.
PES-1 rescue vehicles were an essential element of the space program, but they were not planned to be built in a large series. In just a few years, the entire 13 of such machines was manufactured, including two prototypes. Despite not too many, such all-terrain vehicles actively participated in ensuring space flight and made a significant contribution to the development of near-Earth space.
By the beginning of the seventies, the space industry had formed new requirements for special technology. The size of the spacecraft gradually grew, the crew size increased. The increase in the duration of the flight led to the need for special assistance. The existing PES-1 could not fully cope with new tasks in the context of cosmonaut rescue.

Passenger car, rear view. Photo Os1.ru
In 1972, SKB ZIL developed a new search and evacuation unit called PES-1М. The modernization project involved the removal of a crane and a lodging place. Instead of them, a fiberglass insulated cabin with space for astronauts, doctors, etc. was placed on the hull. The new large-sized cabin occupied more than half of the total length of the car, but did not increase its height. Installing a new cabin has led to the need to add some other units.
Fiberglass cabin new design received several side windows, upper hatches and aft door for landing. Due to the high chassis height, there was a folding ladder next to the door. In the floor there were hatches for access to the transmission units. In the passenger cabin placed three single seats. Another six seats had a double structure and could be given for the installation of a stretcher. Three cabinets were installed to transport various goods, a table with a drawer, etc. The crew had a washstand, fire extinguishers, artificial respirators, sets for droppers, various medicines and other equipment.
It was proposed to equip the passenger cabin with means of ventilation and heating. He was responsible for heating by an autonomous heater working on gasoline. For his work had to provide an additional fuel tank capacity 110 l. If necessary, this capacity was connected to the fuel system of the car, which increased the cruising range to 700 km.
After the necessary tests, the search and evacuation unit PES-1M was accepted for supply. The corresponding order appeared in 1974 year. Over the next few years, the developer has built and delivered six such machines to the Air Force. It is known that soon after the appearance of a new special machine, the PES-1 family received unofficial nicknames. The base all-terrain vehicle was nicknamed "The Crane", and the passenger version was designated as "Salon".

The descent vehicle of the Yantar-2 type, which was proposed to be transported on PES-1B vehicles. Photo of Wikimedia Commons
Pretty soon, the practice showed the full potential of the updated search and rescue complex. Acting together, PES-1 and PES-1M showed outstanding results. Two cars could quickly solve the problem of finding the landed astronauts and proceed to their evacuation. "Salon" could take on board the astronauts and, without waiting for the completion of work with the descent vehicle, return back. At the same time, unlike the base "Crane", he carried astronauts in comfortable conditions.
In 1974, a new model of technology was created, which appeared due to progress in the field of spacecraft. New reconnaissance satellites of the Yantar project were being prepared for operation. Their descent vehicle, which delivered films with images of specified territories to the Earth, differed from existing products in a kind of large size. Existing PES-1 machines could not be used with such devices.
To solve this problem was developed machine PES-1B. It differed from the base sample only in the design of the crane and the cradle. The boom of the crane was extended to 5,5 m, and the support for the descent vehicle was altered in accordance with the requirements of the new payload. The operation of such technology began in the year 1977. The Yantar satellites were planned to be built in a large series and often launched, but the air force ordered only three all-terrain vehicles to work with them.
The serial production of special machines of the PES-1 family continued until the 1979 year. During this time, the entire 22 all-terrain vehicle with various equipment was built. The most massive version was the base "Crane" - 13 units. The number of "salons" was almost half as much - only 6 units. Three PEU-1B with an extended boom of the crane were the last from the assembly shop.

PES-1 in the museum near Moscow. Photos of the State Military Technical Museum / gvtm.ru
Active operation of the PES-1 family continued until the first half of the eighties. During this period, the special design bureau of the Plant. Likhachev developed and brought to mass production new models of special machines for space launch. These machines are part of the search and evacuation complex PEC-490. Later they came up with the common nickname "Blue Bird". In addition, other projects were developed, both with a groundwork for practical application, as well as an experimental one. For example, the prototype of the PES-1Р differed from the base machines by the presence of an additional reactive powerplant designed to increase the maneuverability.
Search and evacuation units of the PES-1 family were not massive, and moreover, they were decommissioned for a long time. Over the past decades, almost all such machines have been disposed of. Fortunately, several interesting all-terrain vehicles escaped this fate. So, in the State Military Technical Museum (v. Ivanovskoye, Moscow region) there is a restored sample of the machine PES-1 of the “Crane” type. This unique exhibit is shown along with other interesting developments of SKB ZIL.
The development of manned space flight has led to the emergence of new requirements for ground systems. Among other samples of the industry, special vehicles were required that could find and remove astronauts and their descent module from a remote area. Already in the mid-sixties, this problem was successfully solved. The complex PES-1 became the first model of its kind in our country. In the future, on the basis of his ideas and decisions, new samples of a similar purpose were created, which are still ensuring the fast and safe return of astronauts to their homes.
Based on:
http://gvtm.ru/
http://os1.ru/
http://denisovets.ru/
http://русская-сила.рф/
http://novosti-kosmonavtiki.ru/
R. Danilov Cosmonaut machine // Technique and armament, 2010. No.8.
During the first years of development, the Soviet manned cosmonautics had certain problems with the search and evacuation of the landing crews. The search for the landing site was carried out with the help of airplanes and helicopters with appropriate radio equipment, after which available vehicles with rescuers, doctors, engineers, etc., were to arrive in a given area. This set of measures met the basic requirements, but was not without flaws. Thus, in the landing areas, the weather was often bad, and the landing of astronauts in an inaccessible area could seriously complicate the work of rescuers.

Machine PES-1 in the museum. Photos of the State Military Technical Museum / gvtm.ru
At the end of 1964, the general designer of rocket-space systems S.P. Korolev made a proposal to create special ultra-high-terrain vehicles capable of finding and collecting astronauts, regardless of the weather and the landing site. Soon this proposal turned into a task for the Special Design Bureau of the Plant. Likhachev (SKB ZIL), headed by V.A. Grachev. In December, the Air Force Command approved the requirements for a new life-saving tool, and a technical task was soon drawn up. By the beginning of spring 1965, SKB ZIL specialists were engaged in designing a promising machine.
Long before the completion of development work, practice confirmed the need for a new all-terrain vehicle. On March 19, 1965, the Voskhod-2 spacecraft with a failed landing system landed at a considerable distance from the calculated area. Cosmonauts P.I. Belyaev and A.A. Leonov had two days to wait for help in a remote taiga area. Fortunately, they were found and taken out "to the mainland" by rescue forces aviation. This incident showed how useful a rescue all-terrain vehicle could be.
According to known data, the new “space” project of SKB ZIL received two names. The factory documentation included the designation ZIL-132K, indicating the application of some solutions of the project already under development. At the same time, the official name of the PES-1 - “Search and evacuation unit, the first model” was used. Subsequently, the factory name was forgotten, and almost always a special machine is referred to as PEU-1.
The scheme of the all-terrain vehicle. Picture of the State Military Technical Museum / gvtm.ru
In accordance with the new ideas of S.P. The Queen and his colleagues, the search for the descent vehicle was still to be carried out by aviation. After identifying the approximate landing area, it was proposed to deliver the PES-1 all-terrain vehicle to the work site. In this regard, the latter, in terms of size and weight, was supposed to fit within the restrictions of the cargo cabins of the An-12 aircraft and the Mi-6 helicopter. The car had to move on land and water. It was necessary to ensure the possibility of transporting people and goods in the form of a descent vehicle. On board the all-terrain vehicle, it was necessary to carry a large number of various rescue equipment.
Creating a search and evacuation unit with specific characteristics and appearance was not the easiest thing, but the designers of SKB ZIL successfully coped with it. Having a solid experience in designing and construction of all-terrain vehicles with different capabilities, the design office was able to form the best variant of the all-terrain vehicle, fully satisfying the technical task. To solve the problems posed, it was necessary to use some ready-made ideas, but it required the development of a number of new proposals.
The result of the work of V.A. Grachev and his colleagues became a three-axle all-wheel drive vehicle with a displacement hermetic housing of a recognizable type. On board the PES-1 a variety of instruments and devices with different functions should have been present. So, the rescue vehicle needed special radio navigation equipment, and to work with descent vehicles, it needed its own crane and special support device.

The front of the case with open covers. In the background you can see the tilted cap of the cabin, on the front - the cover of the hardware compartment. Photo Os1.ru
For the first time in the domestic practice in the ZIL-132K project, a large-sized welded aluminum frame was used. The frame was assembled from a set of longitudinal and transverse metal profiles connected with kerchiefs. The central part of the frame was provided with an X-shaped brace, which allowed it to withstand heavy loads. The development of the frame required the creation and implementation of new technologies for assembling large-size loaded aluminum structures.
Outside, the aluminum frame was covered with fiberglass housing. It was made in the form of a unit of large elongation bath with a characteristic rounded front and vertical sides. In the latter there were large arches, due to which the wheels did not extend beyond the hull. Behind the fiberglass bath had a vertical forage leaf. On top of the case there were several units. In front of the machine, a radio equipment cover with several hatches was provided; behind her have provided a folding cockpit cap. Behind the cabin there was a flat platform for a crane, and in the stern there was a relatively deep body for the descent vehicle.
Due to the special tasks and the specific distribution of loads, PES-1 has received the appropriate layout. In front of the hull was a compartment for radio navigation devices, with which it was proposed to balance the heavy load in the stern. Immediately behind him placed quite a large cabin. Behind the cab was the installation of the engine and some transmission devices. In connection with the use of all-wheel drive chassis under the transmission had to give large amounts in the lower part of the body.
The all-terrain vehicle received a ZIL-375 gasoline engine with horsepower 180. In a small engine compartment due to the dense layout, it was possible to place all the necessary devices, including a fuel tank with a capacity of 365 l. The silencer of the exhaust system brought to the roof of the hull deck. A transmission with onboard power distribution, built on the basis of hydromechanical and mechanical devices, was connected to the engine. A part of its units was borrowed from the ZIL-135L army vehicle.
PED-1 all-terrain vehicle is being tested. Photo Os1.ru
A torque converter connected to the engine followed by an automatic transmission. Then the torque hit the transfer case, which distributed it between the wheels of the two sides and the water cannon. The shafts from the transfer case approached the middle and rear wheels on each side and connected to the gearboxes. With the help of several cardan shafts, the power went from the central axis to the front one. Each wheel received an angular and spur gear. To increase the buoyancy of the cavity, the gearboxes could be flushed with air.
The all-terrain vehicle was equipped with a three-axle chassis with large-diameter wheels with a combined suspension. The front and rear axles received an independent torsion bar suspension, and the middle wheels had stiff mounts. It was originally planned to use tractor tires I-175 with a diameter of 1523 mm and a width of 420 mm, but because of its original purpose, such products could not withstand loads during high-speed driving. The problem was solved with the help of the Research Institute of Tire Industry and the Dnepropetrovsk Tire Plant. The joint efforts of the three organizations created new ID-15 tires with the required dimension and the desired resource. PES-1 wheels have a centralized tire pressure regulation system. The first and third axes were made manageable.
Aft propulsion unit was located in the stern of the hull. The intake window of this device is placed in the bottom. The stream of water was thrown through an oval window in the aft part. Thrust vectoring was carried out using two steering feathers placed inside the hull.
In front of the hull was a four-seater cockpit. The driver and rescuers or astronauts were located on the folding seats of the simplest design. Get into the car offered in an unusual way. The cabin did not have doors, but its upper cap, which was above the level of the hull's deck, could fully fold up and back. In addition, a pair of hatches was provided in its roof. Developed cabin glazing provided all-round visibility. On the ground crew had all the necessary controls. So, the driver could control the work of the chassis, while other crew members had to use radio navigation equipment and other devices.
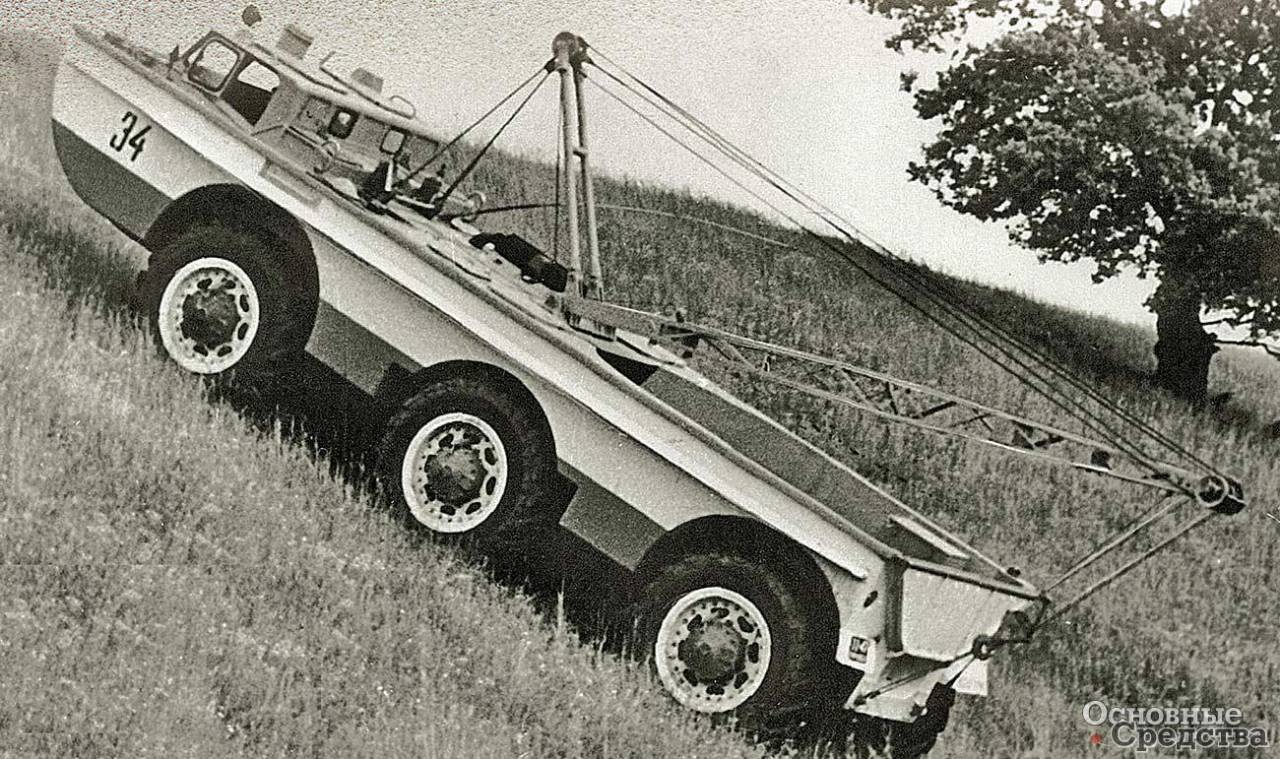
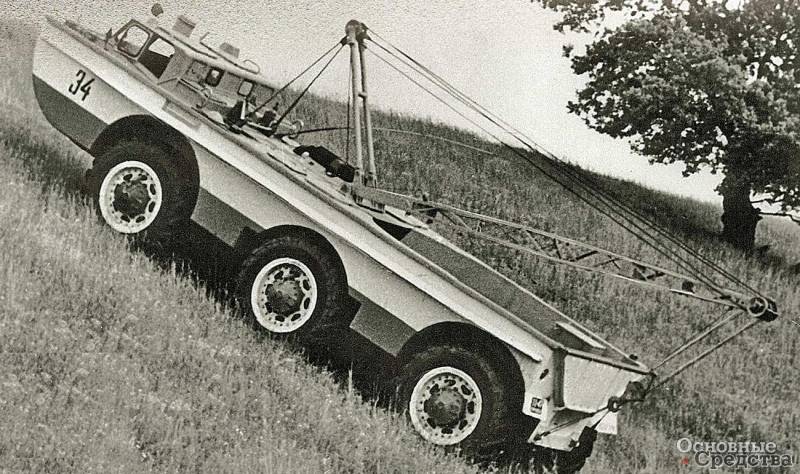
Rise on a steep slope. Photo Os1.ru
For communication with the base, other rescuers or astronauts, the search and evacuation unit carried a pair of P-855U radio stations. In addition, for work in remote and remote areas, the car was equipped with navigation equipment. With its help, the crew could monitor their location, as well as go to a given point. The maximum radial error during navigation did not exceed 6% of the distance traveled.
In accordance with the requirements of the customer, the PES-1 was to evacuate not only the astronauts, but also their descent module. For his loading aboard all-terrain vehicle got a crane. Above the engine compartment a reinforced base was placed for a turntable with a crane boom. The latter was made in the form of a metal truss with a rise due to winch cables. The boom reach reached 4,9 m, it was possible to lift it at an angle of up to 75 °. The maximum load carrying capacity is 3 t. The crane was operated with an electric winch of the type LPG-GO with two drums. The first was responsible for the cables controlling the position of the boom, while the second was for lifting the load. Crane controlled remote wired remote.
The aft part of the hull was given under the lodgement for the installation of the descent vehicle. The spacecraft was proposed to be installed vertically on the support part of the required shapes and sizes. On the cargo platform, it was possible to install several types of cradles, designed for different descent vehicles. On top of the load should wear a mooring ring with a set of stretch marks. To facilitate loading and unloading part of the rear side of the hull performed folding.

PES-1 with a descent vehicle. Photos of the State Military Technical Museum / gvtm.ru
In case of working with a descent vehicle in water, the left side of the hull received a mooring circle. Before mooring it was proposed to put on a special inflatable belt. Towing of the moored descent vehicle was allowed at waves of height not more than 1 m.
In the case of PES-1 there were boxes for transportation of various additional equipment. On board the car were stored inflatable boat, towing cables, tailing tools, fire extinguisher, etc. Also provided for transportation of first-aid kits with the necessary set of equipment and medicines.
For serial all-terrain vehicles of the new model has been developed a special color. The lower part of the hull, before the conditional waterline, was painted in red. The rest of the sides, up to the roof-deck, was ivory. The deck and cabin cap were proposed to be bright orange. Similar coloring of PES-1 provided high visibility on different landscapes. The car could easily be noticed both from the air and from the ground or from the water.
The special purpose machine had not the smallest dimensions. The all-terrain vehicle reached 8,4 m (including the crane in the stowed position - 9,62 m), width - 2,58 m, height - 2,5 m (with a crane - 3,7 m). Wheelbase - 5 m with inter-wheel spans 2,5 m. Track - 2,15 m. Curb weight PES-1 / ZIL-132K was determined at the level of 8,17 t. Gross weight - 3 t. 11,72 km / h. The water cannon provided acceleration to 68-7 km / h. The fuel range was 7,5 km.
Astronauts are studying a new search and evacuation unit, 1966. Photo by the State Military Technical Museum / gvtm.ru
The three-axle chassis with large-diameter wheels ensured high throughput on any surfaces and landscapes. With a load, the all-terrain vehicle could climb the slope of the 30 ° steepness and move with roll to the 22 °. The minimum turning radius provided by a pair of controlled axes did not exceed 10 m.
Designers SKB ZIL managed to successfully solve the tasks, but it took a long time. The first prototype of the ZIL-132K / PES-1 machine was built only in the summer of 1966 — about a year and a half after receiving the corresponding task. The prototype was immediately sent to the factory tests. At the same time it was shown to representatives of the space industry. Among others, cosmonauts Yu.A. Gagarin and A.A. Leonov. Representatives of the customer praised the new all-terrain vehicle.
In the year 1967 them. Likhachev built a second experimental search and evacuation unit. By this time, most of the shortcomings of the project was eliminated, and both prototypes soon came to the state tests. Inspections of two PES-1 were carried out at different test sites and highways in different regions of the Soviet Union. The equipment was tested in virtually all conditions in which she could fall during her further service. In all cases, all-terrain vehicles showed themselves well and confirmed the calculated characteristics.

All-terrain vehicle PEU-1M "Salon". Photos of the State Military Technical Museum / gvtm.ru
In the next year, 1968, ZIL handed over to the air force an installation batch of five special vehicles of new construction. For some time, the search and rescue units of the Air Force studied and mastered the new technique. In August, an order appeared on 1969, according to which PES-1 was accepted for supply by the armed forces. Now the new technology, both already built and planned for the order, was to become a full-fledged element of the cosmonauts search and evacuation system.
PES-1 rescue vehicles were an essential element of the space program, but they were not planned to be built in a large series. In just a few years, the entire 13 of such machines was manufactured, including two prototypes. Despite not too many, such all-terrain vehicles actively participated in ensuring space flight and made a significant contribution to the development of near-Earth space.
By the beginning of the seventies, the space industry had formed new requirements for special technology. The size of the spacecraft gradually grew, the crew size increased. The increase in the duration of the flight led to the need for special assistance. The existing PES-1 could not fully cope with new tasks in the context of cosmonaut rescue.

Passenger car, rear view. Photo Os1.ru
In 1972, SKB ZIL developed a new search and evacuation unit called PES-1М. The modernization project involved the removal of a crane and a lodging place. Instead of them, a fiberglass insulated cabin with space for astronauts, doctors, etc. was placed on the hull. The new large-sized cabin occupied more than half of the total length of the car, but did not increase its height. Installing a new cabin has led to the need to add some other units.
Fiberglass cabin new design received several side windows, upper hatches and aft door for landing. Due to the high chassis height, there was a folding ladder next to the door. In the floor there were hatches for access to the transmission units. In the passenger cabin placed three single seats. Another six seats had a double structure and could be given for the installation of a stretcher. Three cabinets were installed to transport various goods, a table with a drawer, etc. The crew had a washstand, fire extinguishers, artificial respirators, sets for droppers, various medicines and other equipment.
It was proposed to equip the passenger cabin with means of ventilation and heating. He was responsible for heating by an autonomous heater working on gasoline. For his work had to provide an additional fuel tank capacity 110 l. If necessary, this capacity was connected to the fuel system of the car, which increased the cruising range to 700 km.
After the necessary tests, the search and evacuation unit PES-1M was accepted for supply. The corresponding order appeared in 1974 year. Over the next few years, the developer has built and delivered six such machines to the Air Force. It is known that soon after the appearance of a new special machine, the PES-1 family received unofficial nicknames. The base all-terrain vehicle was nicknamed "The Crane", and the passenger version was designated as "Salon".
The descent vehicle of the Yantar-2 type, which was proposed to be transported on PES-1B vehicles. Photo of Wikimedia Commons
Pretty soon, the practice showed the full potential of the updated search and rescue complex. Acting together, PES-1 and PES-1M showed outstanding results. Two cars could quickly solve the problem of finding the landed astronauts and proceed to their evacuation. "Salon" could take on board the astronauts and, without waiting for the completion of work with the descent vehicle, return back. At the same time, unlike the base "Crane", he carried astronauts in comfortable conditions.
In 1974, a new model of technology was created, which appeared due to progress in the field of spacecraft. New reconnaissance satellites of the Yantar project were being prepared for operation. Their descent vehicle, which delivered films with images of specified territories to the Earth, differed from existing products in a kind of large size. Existing PES-1 machines could not be used with such devices.
To solve this problem was developed machine PES-1B. It differed from the base sample only in the design of the crane and the cradle. The boom of the crane was extended to 5,5 m, and the support for the descent vehicle was altered in accordance with the requirements of the new payload. The operation of such technology began in the year 1977. The Yantar satellites were planned to be built in a large series and often launched, but the air force ordered only three all-terrain vehicles to work with them.
The serial production of special machines of the PES-1 family continued until the 1979 year. During this time, the entire 22 all-terrain vehicle with various equipment was built. The most massive version was the base "Crane" - 13 units. The number of "salons" was almost half as much - only 6 units. Three PEU-1B with an extended boom of the crane were the last from the assembly shop.

PES-1 in the museum near Moscow. Photos of the State Military Technical Museum / gvtm.ru
Active operation of the PES-1 family continued until the first half of the eighties. During this period, the special design bureau of the Plant. Likhachev developed and brought to mass production new models of special machines for space launch. These machines are part of the search and evacuation complex PEC-490. Later they came up with the common nickname "Blue Bird". In addition, other projects were developed, both with a groundwork for practical application, as well as an experimental one. For example, the prototype of the PES-1Р differed from the base machines by the presence of an additional reactive powerplant designed to increase the maneuverability.
Search and evacuation units of the PES-1 family were not massive, and moreover, they were decommissioned for a long time. Over the past decades, almost all such machines have been disposed of. Fortunately, several interesting all-terrain vehicles escaped this fate. So, in the State Military Technical Museum (v. Ivanovskoye, Moscow region) there is a restored sample of the machine PES-1 of the “Crane” type. This unique exhibit is shown along with other interesting developments of SKB ZIL.
The development of manned space flight has led to the emergence of new requirements for ground systems. Among other samples of the industry, special vehicles were required that could find and remove astronauts and their descent module from a remote area. Already in the mid-sixties, this problem was successfully solved. The complex PES-1 became the first model of its kind in our country. In the future, on the basis of his ideas and decisions, new samples of a similar purpose were created, which are still ensuring the fast and safe return of astronauts to their homes.
Based on:
http://gvtm.ru/
http://os1.ru/
http://denisovets.ru/
http://русская-сила.рф/
http://novosti-kosmonavtiki.ru/
R. Danilov Cosmonaut machine // Technique and armament, 2010. No.8.
Information