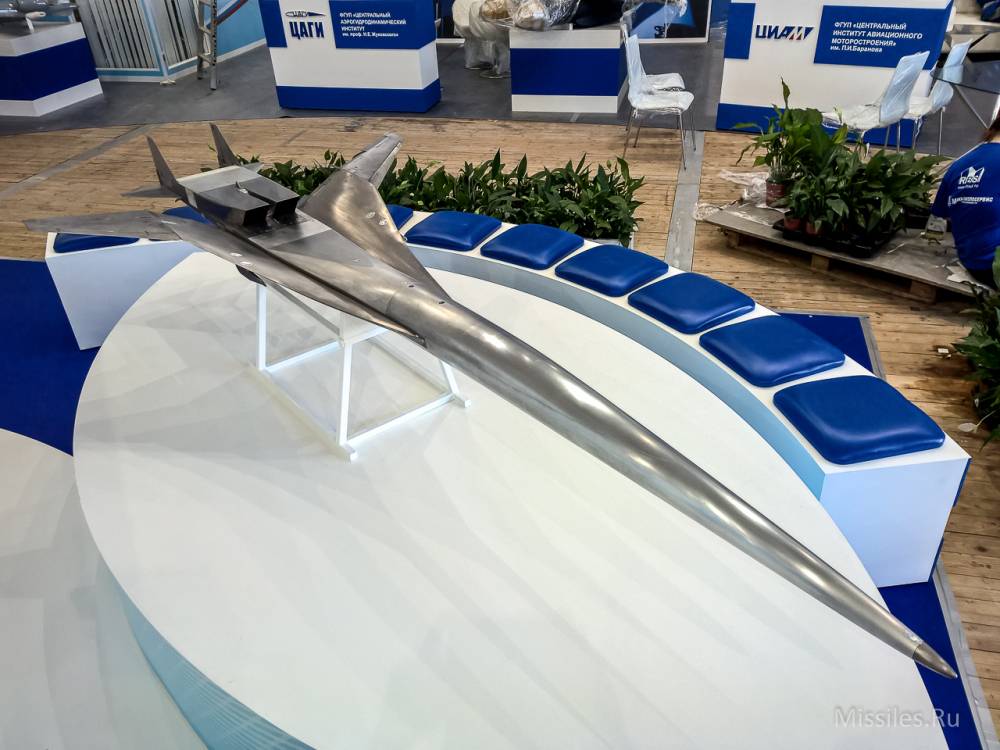
Multimode hypersonic unmanned aerial vehicle "Hammer"

Currently, NPO Molniya on the subject of research and development work Molot is developing a multi-mode hypersonic unmanned aerial vehicle. This UAV is considered as a prototype demonstrator of the technology of a hypersonic unmanned propeller with a combined screen turbo-ramjet power plant. The key technology of the prototype is the use of a ramjet engine (ramjet) with a subsonic combustion chamber and a screen intake device.
Calculated and experimental parameters of the prototype demonstrator:
Mach cruise numbers M = 1.8 ... 4
- flight heights from small to Н = 20 000 m,
- flying weight up to 530 kg.
- ground start with a launcher, using a solid-fuel accelerator.

The history of this SRW was a project of a multi-mode supersonic unmanned aerial vehicle (MSBLA) developed by NPO Molniya, which determined the aerodynamic shape of a promising unmanned or manned accelerator. The key technology of MSBLA is the use of a ramjet engine (ramjet) with a subsonic combustion chamber and a screen intake device. MSBLA design parameters: Mach cruising numbers M = 1.8 ... 4, flight altitude from low to H ≈ 20 000 m, starting weight up to 1000 kg.
The air intake layout investigated at the TsAGI booth of the SVS-2 showed low efficiency of the applied ventral wedge screen made “at the same time” with the fuselage (Fig. A) and a rectangular screen with a span equal to the width of the fuselage (Fig. B).

Both of them provided an approximate constancy of the coefficients for the restoration of the total pressure ν and the flow rate f in the angle of attack instead of increasing them.
Since the frontal screen of the type used on the X-90 rocket did not fit for the MSBLA as a prototype of the accelerating plane, it was decided on the basis of experimental studies of TsAGI of the early 80-s to develop the ventral screen, retaining the configuration with a two-stage central body obtained by test results.
During the two stages of experimental research at the TsAGI special CBC-2 test bench, December 2008 - February 2009 and March 2010, with an intermediate stage of numerical search studies, an on-screen air intake device (EVF) was developed with a two-stage conical body having different calculated numbers Mach steps, which allowed us to obtain acceptable thrust in a wide range of Mach numbers.

The effect of the screen consists in an increase in the flow rate and recovery coefficients with an increase in the angle of attack at Mach numbers M> 2.5. The magnitude of the positive gradient of both characteristics increases with increasing Mach number.

The EVZU was first developed and applied on the X-90 hypersonic experimental aircraft developed by Raduga (a cruise missile, according to the NATO classification AS-19 Koala)

As a result, the aerodynamic configuration of the prototype was developed according to the “hybrid” scheme called by the authors, with the integration of the ESU into the carrier system.
The hybrid scheme has features of both a “duck” scheme (by the number and location of the bearing surfaces) and a tailless scheme (by the type of longitudinal control organs). A typical MSBLA trajectory includes launching from a ground-based launcher, acceleration by a solid-fuel accelerator to supersonic ramjet launch speed, a flight according to a predetermined program with a horizontal segment, and braking to a low subsonic speed with a soft landing on a parachute.
It can be seen that the hybrid layout due to the larger screen effect and optimization of the aerodynamic layout under the minimum drag when α = 1.2 ° ... 1.4 ° realizes significantly higher maximum flight Mach numbers M ≈ 4.3 in a wide height range H = 11 ... 21 km. The “duck” and “tailless” schemes reach the maximum value of the number M = 3.72 ... 3.74 at the height H = 11 km. At the same time, the hybrid scheme has a small gain due to the shift of the minimum of resistance and at low Mach numbers, having the range of flight numbers M = 11 ... 1.6 at the height H ≈ 4.25 km. The smallest equilibrium flight region is realized in the “duck” scheme.
The table shows the calculated flight technical data on the developed layouts for typical flight paths.
Flight distances, having the same level for all MSBLA variants, showed the possibility of successfully creating a spreader with a slightly increased relative reserve of kerosene fuel with supersonic flight ranges of the order of 1500 – 2000 km to return to the home airfield. At the same time, the developed hybrid layout, which is a consequence of the deep integration of the aerodynamic scheme and the screen intake device of a ramjet engine, had a clear advantage in flight speed limits and the altitude range in which speed limits are realized. The absolute values of Mach number and flight altitude, reaching Mmax = 4.3 at Hmax Mmax = 20 500 m, suggest the feasibility of existing reusable aerospace systems in Russia with a hypersonic high-altitude spreader, which provides for weight and, accordingly, cost reduction space disposable stage in 6 – 8 times compared to start from the ground.
This aerodynamic layout was the final option for considering a reusable multi-mode unmanned aircraft of high supersonic flight speeds.
Concept and overall layout
A distinctive requirement for an overclocking aircraft, in comparison with its small-sized prototype, is take-off / landing on an aircraft from existing airfields and the need to fly at Mach numbers less than the Mach number of ramjet launch M <1.8 ... 2. This determines the type and composition of the combined power plant of the aircraft - a ramjet engine and afterburner turbojet engines (TRDF).
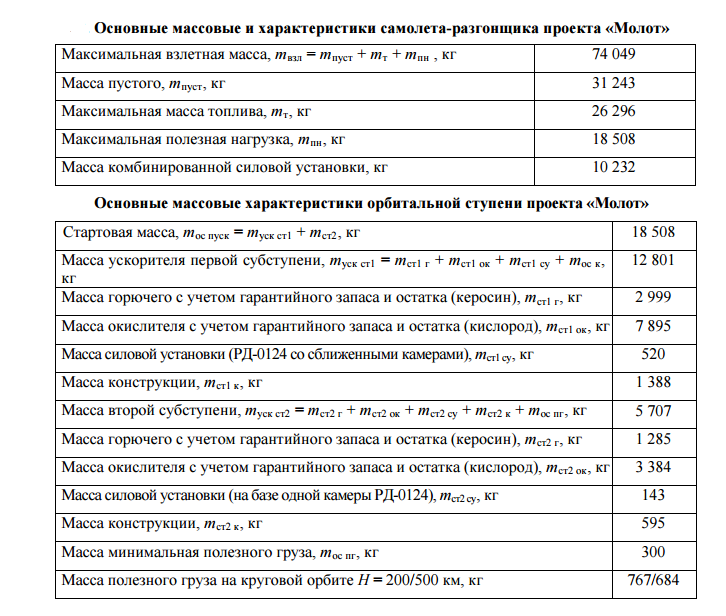
On the basis of this, the technical layout and general layout of the spreader aircraft for a light-class transport space system with a design payload of the order of 1000 kg to a low near-earth orbit 200 km was formed. The weight parameters of the two-stage orbital stage were estimated based on the RD-0124 oxygen-kerosene engine using the characteristic velocity method with integral losses, based on the starting conditions from the accelerator.

At the first stage, an RD-0124 engine (30 000 hollow thrust, kg, specific impulse 359 с) is installed, but with a reduced frame diameter and closely spaced cameras, or an RD-0124М engine (differs from the base one by a single camera and a new nozzle of a larger diameter); at the second stage, the engine with a single camera from the RD-0124 (adopted void thrust 7 500 kg). Based on the obtained weight summary of the orbital stage with the total weight of 18 508 kg, its configuration was developed, and on its basis the layout of the hypersonic accelerating aircraft for the take-off weight of 74 000 kg with a combined power plant (CSU).
LCP includes:
• ramjet engine with a similar prototype of the ESD, type and layout of the combustion chamber;
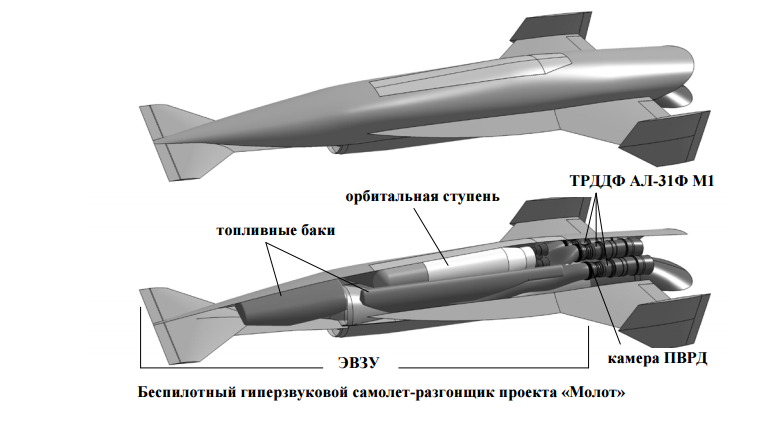
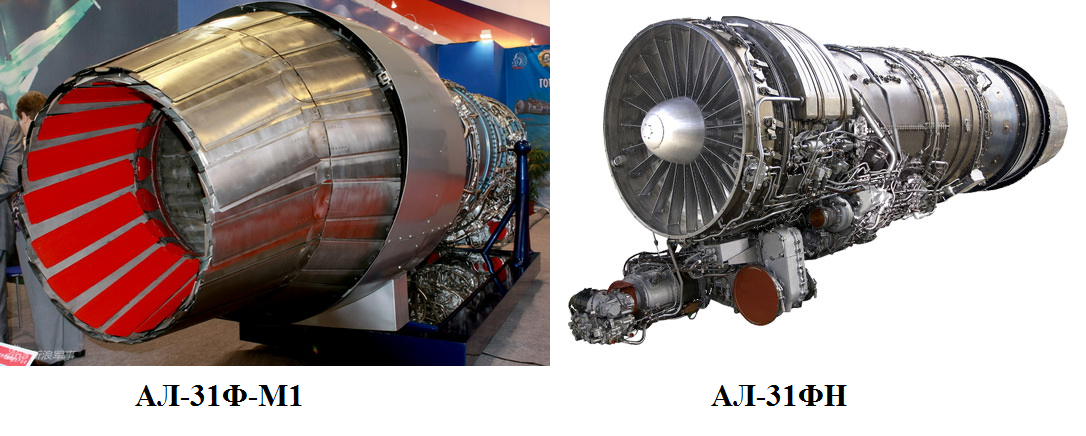
• Three turbojet two-circuit afterburner engines AL-31F М1
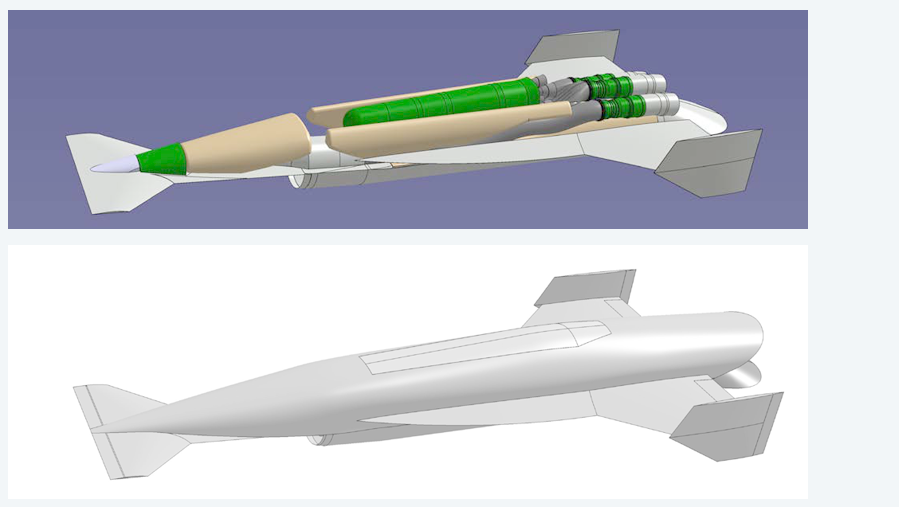
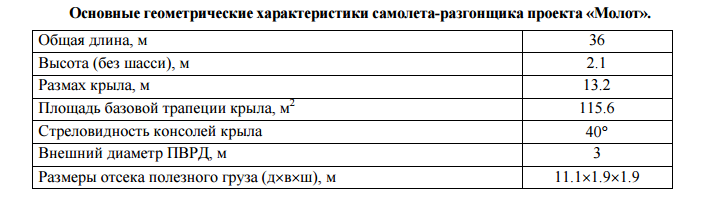
TRDF and ramjet engine are arranged in a vertical package that allows you to mount and maintain each of them separately. To accommodate the ramjet with an ESD of maximum size and, accordingly, thrust, the entire length of the vehicle was used. The maximum take-off weight of the machine 74 t. Empty weight - 31 t.
The section shows an orbital stage - a two-stage liquid PH weighing 18,5 tons, bringing the 1000 KL to the low-Earth orbit 200 km. Also seen are 3 TRDDF AL-31FM1.
Experimental testing of a ramjet of this size is supposed to be carried out directly in flight tests, using overclocking turbofan engines. When developing a single air intake system, the following basic principles were adopted:
• Minimum of moving parts with minimum power loads on them;
• Full preservation of the theoretical geometry of the prototype ramjet internal memory device.
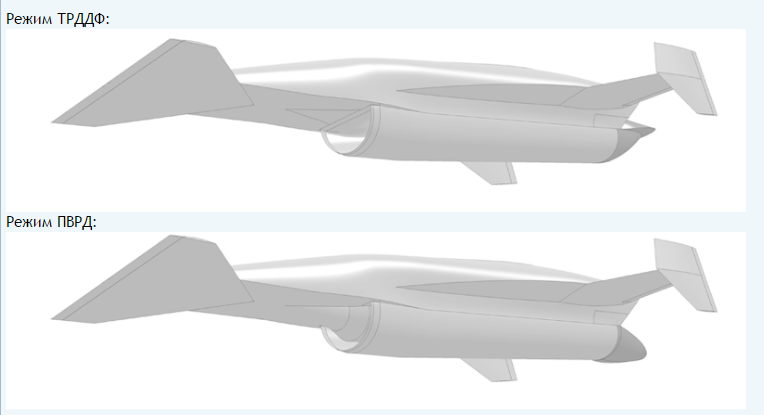
Implemented by separating ducts for TRDF and ramjet at the supersonic part of the air intake and developing a simple-to-use transformer device that converts the “back and forth” supersonic part of the FEM to unregulated configurations, simultaneously switching the air supply between the channels. The ESD of the apparatus during takeoff works on TRDDF; when the speed is set to M = 2,0, it switches to a ramjet.
Behind the EVZU transformer device are a horizontal package, a payload compartment and main fuel tanks. The use of supplementary tanks is necessary for thermal isolation of the “hot” fuselage design and “cold” heat-insulated tanks with kerosene. The payload compartment houses the TRDF compartment, which has flow channels for cooling the engine nozzles, the design of the compartment, and the upper flap of the ramjet nozzle when the TRDF is in operation.
The principle of operation of the ESWU transformer of the accelerating plane excludes, with an accuracy to a small value, a force reaction to the moving part of the device from the side of the incident flow. This allows minimizing the relative mass of the air intake system by reducing the mass of the device itself and its drive in comparison with traditional adjustable rectangular air intakes. The ramjet engine has a fissionable stacking nozzle, which, when closed in operation, ensures continuous flow of the stream around the fuselage. When opening the stacker nozzle at the transition to the ramjet operation mode, the upper flap closes the bottom slice of the turbofan engine compartment. The ramjet nozzle, when opened, is a supersonic confuser and, with some degree of under-expansion of the ramjet jet, which is realized at large Mach numbers, provides an increase in thrust due to the longitudinal projection of pressure forces on the upper flap.
Compared with the prototype, the relative area of the wing consoles is significantly increased due to the need for aircraft take-off / landing. Wing mechanization includes elevons only. Keels are equipped with rudders that can be used as brake flaps on landing. To ensure the continuity of flow at subsonic flight speeds, the screen has a deflectable toe. The landing gear's four-column landing gear is placed along the sides to prevent dirt and foreign objects from entering the air intake. Such a scheme has been worked out on an EPOS product, an analogue of an orbital plane, the Spiral system, which allows, like a bicycle chassis, to perform a squat on take-off.
To determine the flight weights, the position of the center of mass and the intrinsic moments of inertia of the spreader aircraft, a simplified solid-state model in a CAD environment was developed.
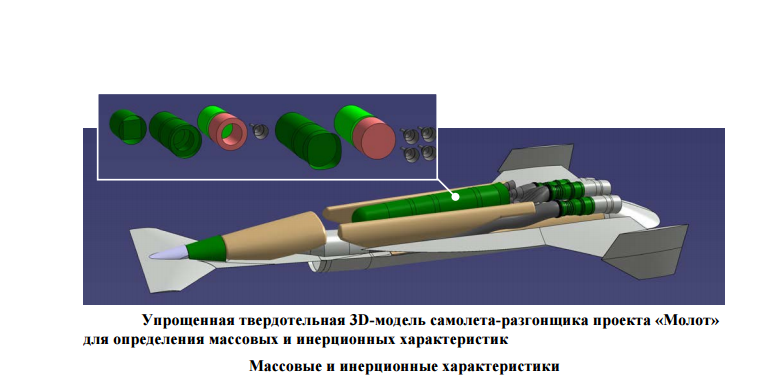
The design, power plant and equipment of the accelerating plane were divided into 28 elements, each of which was estimated by a statistical parameter (the specific weight of the above skin, etc.) and simulated by a geometrically similar solid-state element. For the design of the fuselage and bearing surfaces, weighted statistics on MiG-25 / MiG-31 aircraft was used. The mass of the AL-31F M1 engine is taken “after the fact”. Different percentages of kerosene pouring were modeled by truncated solid-state “casts” of the internal cavities of the fuel tanks.
A simplified solid-state model of the orbital stage was also developed. The masses of structural elements were taken on the basis of the data for the “I” unit (third stage of the Soyuz-2 launch vehicle and the prospective Angara launch vehicle), highlighting the fixed and variable components depending on the mass fuel.
Some features of the results of aerodynamics of the developed aircraft:
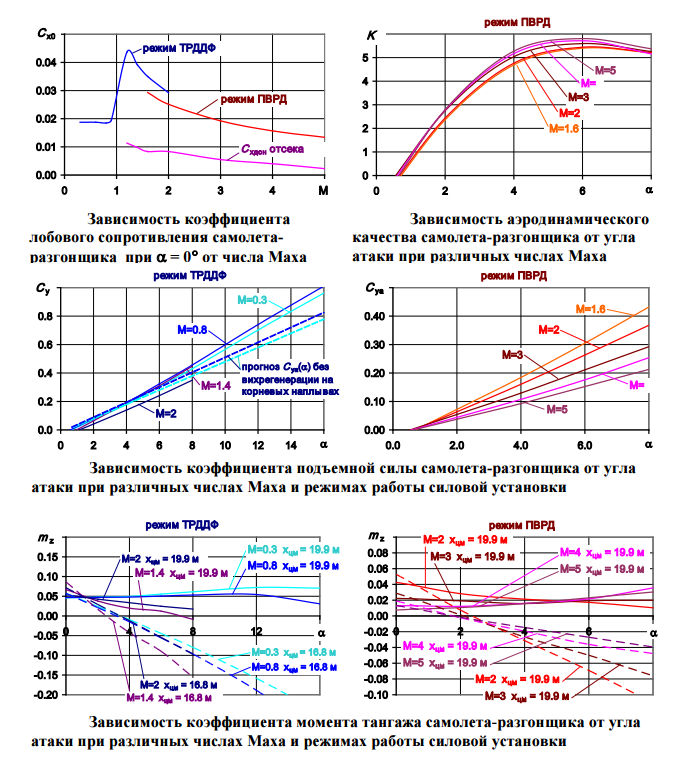
On the spreader plane, in order to increase the flight range, the planning mode is used when configuring under a ramjet, but without supplying fuel to it. In this mode, a nozzle-steamer is used, which reduces its solution when shutting down the ramjet to the duct area, which ensures flow in the ESW channel, such that the thrust of the channel's subsonic diffuser becomes equal to the nozzle resistance:
Ddif ewm = hss ramjet. Simply put, the principle of operation of a throttling device is used on installations for testing the OVC of the type SHS-2 TsAGI. A subassembly-nozzle-steamer opens the bottom section of the TRDF compartment, which begins to create its own bottom resistance, but less than the resistance of an off-stream ramjet with supersonic flow in the OVC channel. In the tests of the EVZU on the installation of the SVS-2 TsAGI was shown stable operation of the air intake with the Mach number M = 1.3, so it can be argued that the planning mode using the stacker nozzle as an ESD throttle in the 1.3 ≤ M ≤ Mmax range is possible.
Flight characteristics and typical flight path
The task of the spreader plane is to launch an orbital step from board in flight, at altitude, flight speed and trajectory angle, meeting the condition for maximum mass of the payload in the reference orbit. At the preliminary stage of research on the Hammer project, the task is to reach this aircraft at maximum altitude and flight speed when using the “hill” maneuver to create large positive trajectory angle values on its ascending branch. In this case, a condition is set to minimize the velocity head at the stage separation for a corresponding reduction in the mass of the fairing and reduce the loads on the payload compartment in the open position.
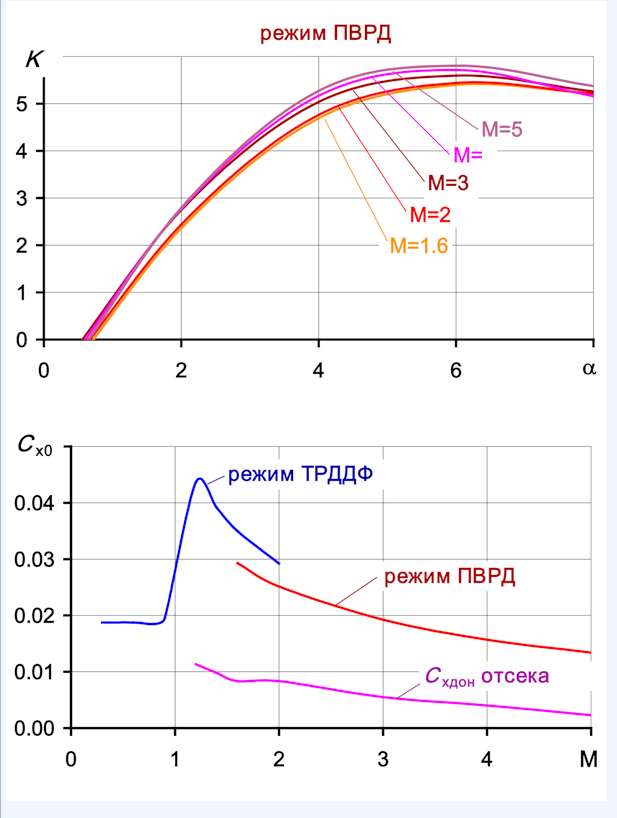
The initial data on the operation of the engines were the flight traction-and-economic characteristics of the AL-31F, corrected from the bench data of the AL-31F M1 engine, as well as the characteristics of the prototype ramjet scaled in proportion to the combustion chamber and the screen installation angle.
In fig. The areas of horizontal steady flight of a hypersonic spreader in various operating modes of a combined power plant are shown.
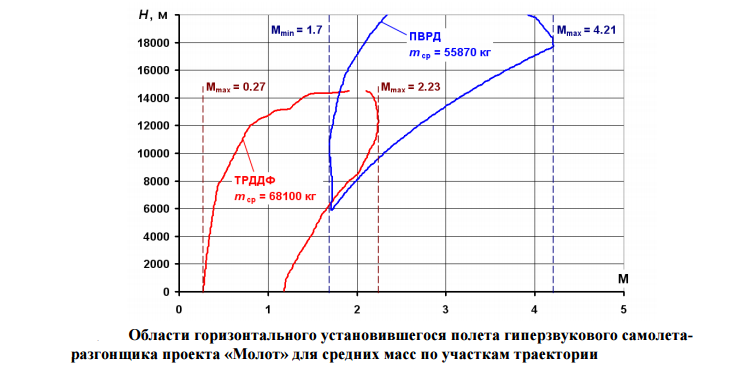
Each zone is calculated for the average for the corresponding section of the “Hammer” project spreader for average masses over the sections of the flight mass trajectory of the device. It can be seen that the projectile reaches the maximum Mach number of flight M = 4.21; when flying on turbojet engines, the Mach number is limited to M = 2.23. It is important to note that the graph illustrates the need to provide the ramjet propulsion system with a wide range of Mach numbers, which was achieved and determined experimentally during the work on the screen air intake device of the prototype. Takeoff is carried out at the speed of separation V = 360 m / s - the bearing properties of the wing and the screen are sufficient without the use of takeoff and landing mechanization and hovering of elevons. After an optimal climb on the horizontal section H = 10 700 m, the aircraft of the projectile goes to supersonic Mach subsonic M = 0.9, switching the combined powerplant at M = 2 and preliminary acceleration to Vopt at M = 2.46. In the process of climbing on a ramjet, the spreader plane turns to the home airfield and reaches the height H0peak = 20 000 m with Mach number M = 3.73.
At this altitude, a dynamic maneuver begins to reach the maximum flight altitude and trajectory angle for launching the orbital stage. A gentle dive is performed with acceleration to M = 3.9 and the subsequent “slide” maneuver. The ramjet ends work at the height H ≈ 25000 m and the subsequent climb is due to the kinetic energy of the spreader. The launch of the orbital stage takes place on the ascending branch of the trajectory at the height H trigger = 44 049 m with Mach number M = 2.05 and the angle of the trajectory θ = 45 °. The spreader reaches a height of Hmax = 55 871 m on the “hill”. On the descending branch of the trajectory, when the Mach number M = 1.3 is reached, the ramjet → TRDF is switched to eliminate the ramjet air intake.
In the configuration of the TRDF, the spreader plans to reach the glide path, having a fuel supply onboard GGZT = 1000 kg.
In normal mode, the entire flight from the moment of shutdown of the ramjet before landing occurs without the use of engines with a reserve in the range of planning.
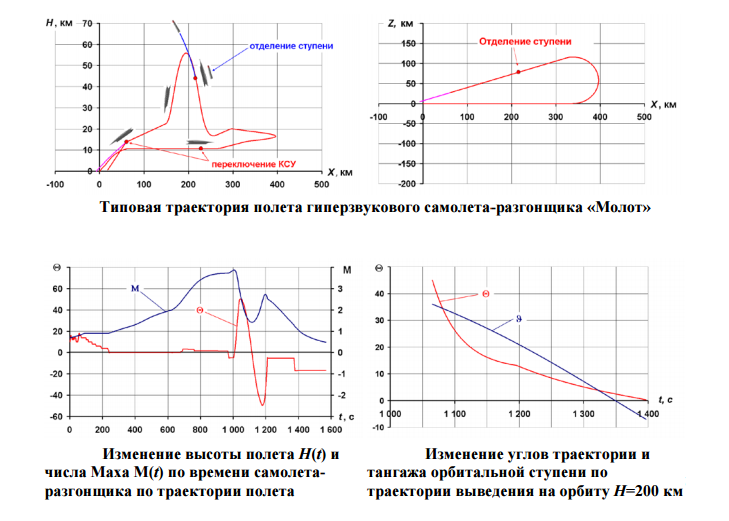
The change in the angular parameters of the step motion is shown in this figure.
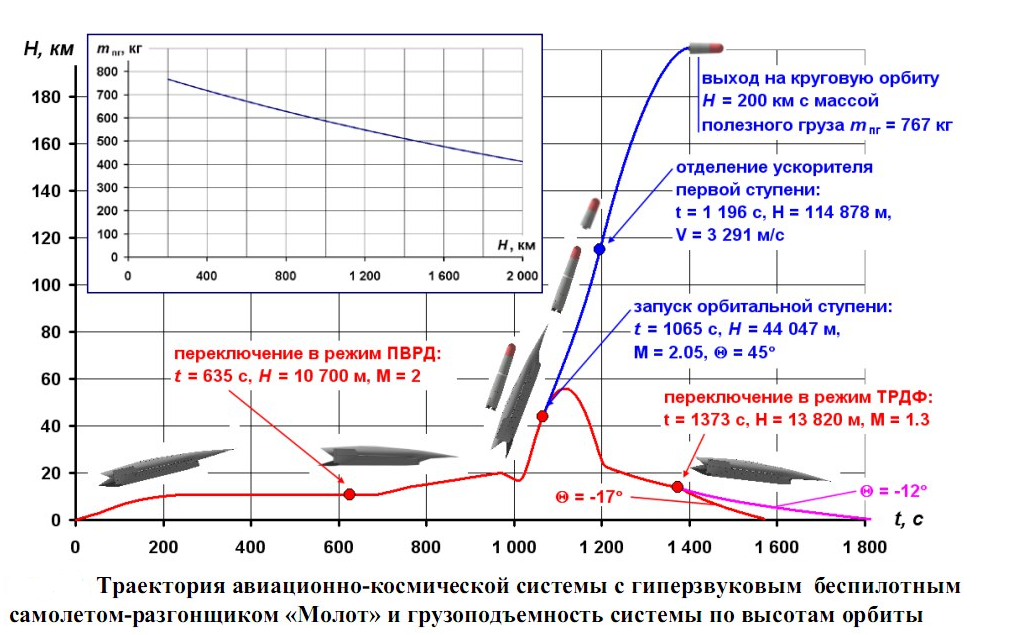
When placed into a circular orbit H = 200 km at a height H = 114 878 m at a speed of V = 3 291 m / s, the accelerator of the first sub stage is separated. The mass of the second sub stage with a load in orbit H = 200 km is 1504 kg, of which the payload is mpg = 767 kg.
The application pattern and flight path of the hypersonic aircraft of the Molot project has an analogy with the American “university” project RASCAL, which is being created with the support of the government agency DARPA.
A feature of the Molot and RASCAL projects is the use of a dynamic maneuver of the "slide" type with passive access to high launch altitudes of the orbital stage Нpusk ≈ 50 m at low high-speed heads; for the Molot, q launch = 000 kg / m24. The launch altitude makes it possible to reduce gravitational losses and the flight time of an expensive disposable orbital stage, that is, its total mass. Small high-speed launch heads make it possible to minimize the mass of the payload fairing or even refuse it in some cases, which is essential for ultra-light systems (mпгН2 <200 kg).
The principal advantage of the Hammer project booster aircraft over RASCAL is the absence of onboard liquid oxygen reserves, which simplifies and reduces the cost of its operation and excludes untapped technology aviation reusable cryogenic tanks. The thrust-to-weight ratio in the ramjet engine operation mode allows the Molot booster to reach the "workers" for the orbital stage of the trajectory angles θ launch ≈ 45 ° on the ascending branch of the “slide”, while the RASCAL accelerator provides its orbital stage with the starting trajectory angle only θ launch ≈ 20 ° losses due to the step turnover maneuver.
The aerospace system with the Hammer hypersonic unmanned propeller surpasses the RASCAL system in terms of specific loading capacity: (mphN500 / mvzl) hammer = 0.93%, (mpnn486 / mvzl) rascal = 0.25%.
Thus, the technology of a direct-flow jet engine with a subsonic combustion chamber (the “key” of the Hammer project) developed and mastered by the domestic aerospace industry surpasses the effective American MIPCC technology of oxygen injection into the TRDF air intake system in terms of efficiency on hypersonic spreaders.
Hypersonic unmanned aerial vehicle weighing 74 000 kg performs takeoff from the airfield, acceleration, climb along an optimized trajectory with an intermediate turn to the takeoff point to the height H = 20 000 m and M = 3.73, a dynamic slide-type maneuver with intermediate acceleration in the canopy dive to M = 3.9. At the ascending branch of the trajectory, when H = 44 047 m, M = 2, a two-stage orbital stage with a mass 18 508 kg, designed on the basis of the RD-0124 engine, is separated.
After passing the “slide” Hmax = 55 871 m in the planning mode, the accelerator flies to the airfield, with a guaranteed supply of 1000 kg of fuel and a landing weight of 36 579 kg. The orbital stage puts into a circular orbit H = 200 km a payload of mass mpg = 767 kg, on H = 500 km mbg = 686 kg.
Help.
1. The laboratory and testing base of NPO Molniya includes the following laboratory complexes:
Laboratory of static strength tests
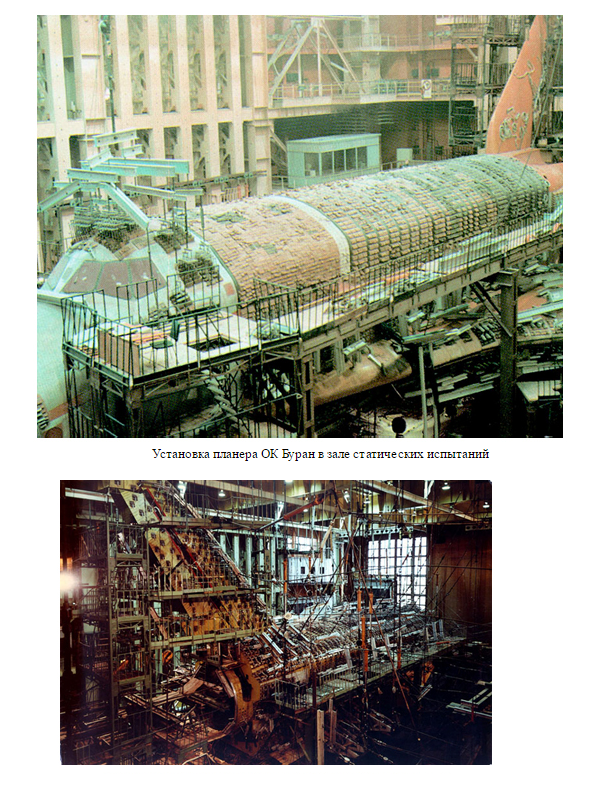
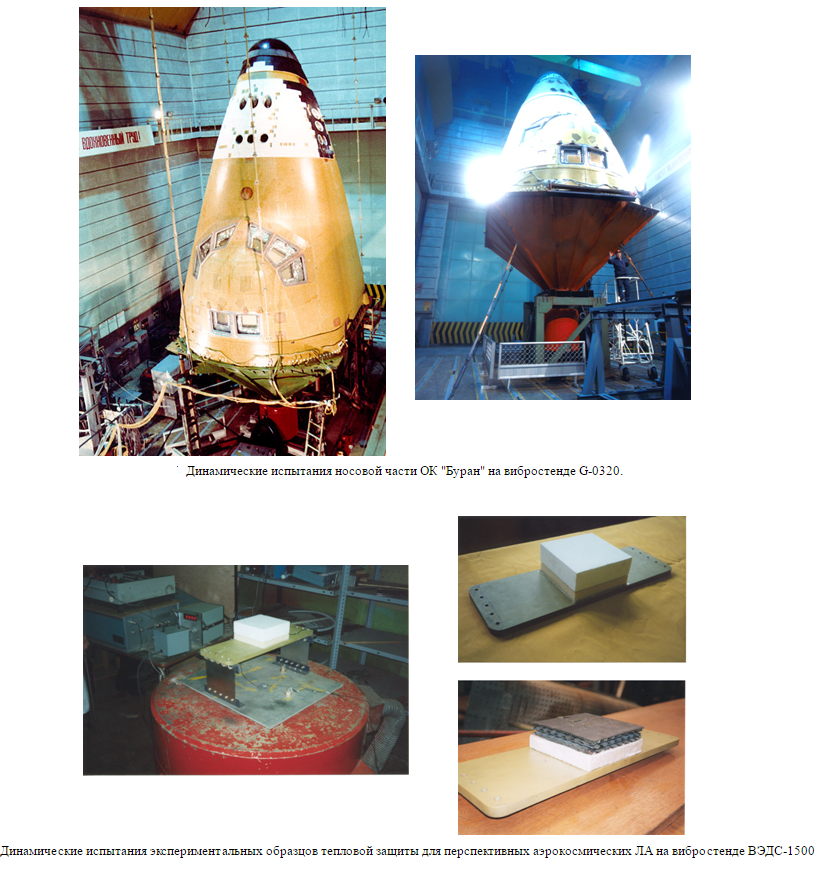
Laboratory dynamic tests
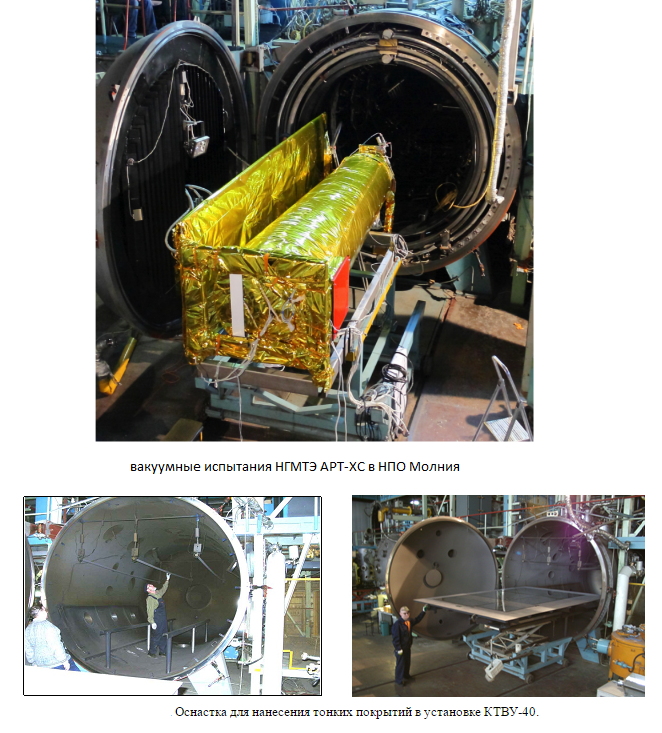
Cryotherm Vacuum Test Laboratory
Climate Test Laboratory
Laboratory of Tribological Testing
2.A this is a project of a high-speed civilian aircraft HEXAFLY-INT

Which is one of the largest international cooperation projects. It involves the leading European (ESA, ONERA, DLR, CIRA, and others), Russian (TsAGI, CIAM, LII, MIPT) and Australian (The University of Sydney, etc.) organizations.

3. Rostec did not allow the bankruptcy of the company that developed the space shuttle "Buran"
Note: The 3-D model at the beginning of the article has nothing to do with the Hammer R & D.
Article based work:
The “Hammer” project of a hypersonic unmanned propeller with a combined screen turbo-ramjet power plant
/ Makeich G.S., Tyukaev M.Yu. (Moscow Aviation Institute (National Research University), Volokolamskoye Highway, 4, Moscow, A-80, GSP-3, 125993, Russia), Chibisov Ya. N. (JSC Scientific Production Association "Lightning") /
Used materials, photos and videos
http://www.mai.ru/
http://www.ciam.ru/
http://www.npomolniya.ru/
http://en.avia.pro/
http://www.darpa.mil/
www.youtube.com
http://otvaga2004.ru/
http://www.3dmir.ru/forum/read/5075.html
http://www.globalsecurity.org/
http://36on.ru/news/economics/64320-v-sovete-federatsii-proshli-dni-voronezhskoy-oblast
Information